単一入力ファイルフォーマット
モデルの設定
Radiossマルチドメインテクニックでは、複数入力フォーマット設定が最初に導入されました。この設定の主な欠点は、独立した入力ファイルをユーザーがマニュアルで構築するという多数の作業が起こることです。それは非常に長く、困難で、非常に大規模で複雑なモデルから小さなドメインを取り出すのは間違いの元になり得ます。
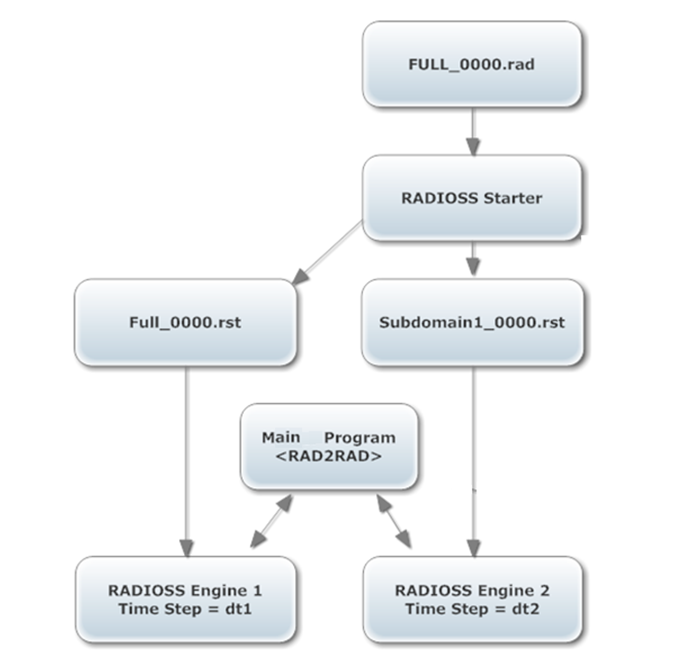
図 1. サブドメイン設定のアーキテクチャ
現時点では1つのドメインのみが指定できますが、この制限は将来改善される可能性があります。
サブドメインの自動生成
サブドメインは、パートのリストによって単純に定義されます。
分割モデル
サブドメイン生成の最初のステップはフルモデルを分割する事です。これは1つのドメインごとにStarterチャイルドプロセスを起動することでなされます。それぞれのプロセスは関連するパートにと対応する節点と要素のみ保持します。/GRNOD、/GRPART または/SURFのようなエンティティグループも同様に分割され、多くのオプションでの分割が可能です(オプションが1つのドメインで参照されない場合、無効になります)。一部のオプションは、分割が複雑で、しばしばドメイン定義の修正を含む特別な取り扱いが必要になります。また、その他の一部のオプションは分割できません。マルチドメインに伴うオプションのより詳しい情報については、現時点での制限事項をご参照ください。
その結果、大抵の場合、サブドメインはユーザーにより指定されたパート(とそれに関連する節点と要素)と共に、あるオプションの分割によって自動的に追加されるいくつかの他の要素または節点から成ります。
ドメイン間の結合
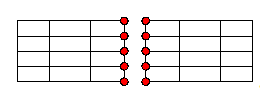
図 2.
ドメイン間の接触
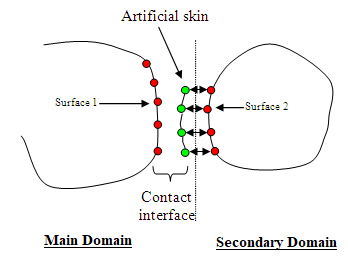
図 3.
単一入力ファイル設定では、ドメイン間の接触は常にサブドメインで計算されます。これは主に、時間ステップが最も小さいドメイン内で接触が扱われる場合、連成の質がはるかに良くなるためです。
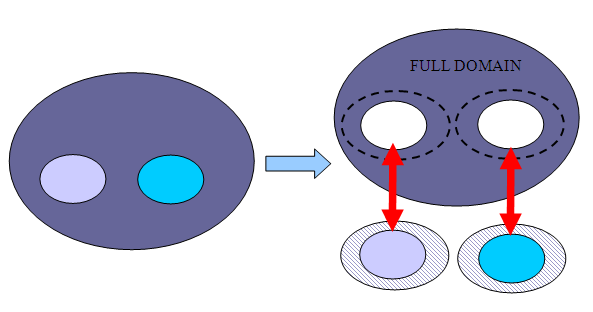
図 4.
- /INTER/TYPE5
- /INTER/TYPE7
- /INTER/TYPE10
- /INTER/TYPE11
- /INTER/TYPE18
- /INTER/TYPE24 ((surf_ID1 > 0, surf_ID2 > 0)または(surf_ID1 > 0, surf_ID2 = 0)の場合)。(grnd_IDs > 0, surf_ID1= 0, surf_ID2 > 0)ではない場合。
ドメイン間のユーザー定義結合
- 剛体: 剛体が2つのドメインを結合している時、特別な取り扱いが与えられます。剛体は2つに分割され、質量、慣性マトリックスと重心位置の計算はドメインごとに実行されます。その後、2つの剛体のパートの2つのメイン節点は、古典的な節点と節点の連成と同様ですが球状でない慣性に適合された定式化を用いてRAD2RADで連成されます。
- タイドインターフェース: タイドインターフェースTYPE2でメイン要素が1つのドメインにあり、セカンダリ節点がもう1つにある場合、 異なるストラテジーが用いられます。ストラテジーは接触に対して用いられるものと同様です。メイン要素はタイドインターフェースがこのドメインで完全に定義されるタイドインターフェースを持つ様にボイド材料でセカンダリ節点を含むドメインに複製されます。その後、マルチドメイン連成がメイン要素の節点のみに作用します。両方のドメインがセカンダリ節点を含む場合、メイン要素の複製が両側で実行されます。
- 剛結、RBE3および円筒ジョイント: 剛結とRBE3には同じ考え方が用いられます。これらのオプションがセカンダリ節点を2つのドメインに持つ場合、全ての失われた節点が両側に複製され、全てのセカンダリ節点がRAD2RADで連成されます。このオプションは次に両側で計算されます。
- /MPC
- /RBE2
- /GJOINT
データ入力
Starter入力ファイル
/SUBDOMAIN/subdomain_ID
subdomain_title
Part1 Part2 ... Partn- Partn
- サブドメインに属するパートの識別子
- subdomain_ID
- ドメイン識別子
- subdomain_title
- サブドメイン名(1つのEngineファイルのルート名になる)
Engine入力ファイル
/RAD2RAD/ON1つのEngineファイル名は、Starter入力ファイルのルート名 "full_model_rootname"_0001.radを使用して作成されます。また、サブドメインに関連する他のEngine入力ファイル名は、 subdomain_title:を使用して作成されます (subdomain_title_0001.radこれは、Starter入力ファイルで /SUBDOMAINカードに指定されています)。
RAD2RAD入力ファイル
データ出力
Starter出力ファイル
ドメインごとに別個のStarter出力ファイルが生成されます。
時刻歴ファイル
両方のドメインからの全ての情報を含む、単一の時刻歴ファイルが生成されます。このファイルは、Starter入力ファイルと同じルート名を持ちます。このファイルの内容は、古典的な単一ドメイン計算で得られる内容と同じです。
時刻歴出力に対する全てのパラメータ(時刻歴のタイプ、出力頻度、フォーマットなど)を、メインドメインのEngineファイルで指定する必要があります。時刻歴に対するパラメータがサブドメインのEngine入力ファイルで指定されても、それらは無視されます。
THファイルの出力の頻度はメインドメインにより定義されるため、THファイルの2つの出力間の許容される最小時間間隔はメインドメインの時間ステップになります。精度を上げるために、メインドメインの時間ステップよりも高い時間頻度を使用することが推奨されます。
ABFファイル
各Radioss Engineにより1つのABFファイルが生成されます。したがって、モデル全体のグローバル変数をプロットするには、各ドメインのグローバル変数を加算する必要があります。
出力ファイル
各ドメインの出力ファイル(各Engine出力)に出力されるグローバル変数を単純に合計することにより、モデル全体のグローバル変数を計算できます。
- エネルギーエラー: エネルギーバランスは、各ドメインで他のドメインとは別に計算されます。つまり、各ドメインではマルチドメインの連成力は外力と見なされ、その仕事量は外力の仕事量に加算されます。この仕事量はエネルギーバランスの計算のために内部的にのみ使用されます。出力ファイルまたは時刻歴に出力される外力の作業量値には含まれません。
- 質量の変化: 質量の変化も局所的に計算されます。つまり、このドメインの質量に対する、選択したドメインで追加された質量の比になります。
アニメーションファイル
各Engineにより一連のアニメーションファイルが生成されます。HyperViewでは、オーバーレイを行うことにより2つのドメインを同時に可視化することが可能です。
RAD2RAD出力ファイル
RAD2RAD実行モジュールにより、rad2rad.outという出力ファイルが生成されます。このファイルには、ドメイン間の結合に関する有用な情報(共通節点の数、連成のタイプなど)が含まれます。
SPEEDUP予測
バージョン14.0以降は、マルチドメイン法の潜在的効率を判断するために、Starterで速度上昇の予測が計算されます。値は、メインドメインのStarter出力ファイルに出力されます。そのため、計算中に1つのドメインで時間ステップが大幅に変化した場合、速度上昇予測は適切ではなくなります。
Engine入力ファイルで定義されている時間ステップ制御オプション(/DT/NODA/CST、/DTIX、…)が、Starterでの時間ステップ予測で考慮されます。
CPUの割り当て
Radiossドメインは順次取り扱われるため、一度に1つのRadiossプロセスだけが実行されることになります。合計CPUリソースは自動的に実行中のプロセスに割り当てられ、他はCPUを消費しない待機モードになります。サブドメイン設定を使用して、すべてのドメインに同じ数のSPMDドメインが自動的に割り当てられます。パフォーマンスの向上のためには、Hybrid-MPPでの実行時に、ドメインごとにSPMDドメインあたりのSMPスレッドと同じ数のSMPスレッドを使用する必要があります。
バージョン12.0.210以降、RAD2RAD実行モジュールは完全に並列化されています。つまり、RAD2RADはEngine実行モジュールとまったく同様に起動する必要があり(同じmpiオプション)、またEngineとRAD2RADプロセスの両方に同じ数のSPMDドメインを使用する必要があります。
マルチドメイン解析の起動
マルチドメイン計算の起動には、AltairCompute Consoleを使用する方法と手動で行う2つの方法があります。
現時点での制限事項
1つのサブドメインのみ定義できます。
- /DFS/DETPOINT/NODE
- /FX_BODY
- /SPHBCS
- /GJOINT
- /MPC
- /RBE2
マルチドメインは全てのLagrange乗数に基づいた運動条件と適合しません。連成の定式化と適合しないためです。
マルチドメインは、節点が接触インターフェースタイプ1またはドメインを跨ぐインターフェースの一部でない限り、インターフェースAMS(アドバンストマススケーリング)、レイリー減衰(/DAMP)、動的緩和(/DYREL)に適合していません。
GAUGE、INTERおよびRWALタイプのセンサーはドメイン間で同期されません。つまり、センサーおよびその全ての関連機能が1つのドメイン内に収まっていない場合、このセンサーの挙動は正しくない可能性があります。一方、DIST、ACCEおよびTIMEタイプのセンサーはマルチドメインに完全に適合し、ドメイン間で同期されます。