ブロックフォーマットのキーワード 移動局所座標系を記述します。
フォーマット
| (1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
| /SKEW/MOV2/skew_ID |
| skew_title |
| node_ID1 |
node_ID2 |
node_ID3 |
|
|
|
|
|
|
|
定義
| フィールド |
内容 |
SI 単位の例 |
| skew_ID |
スキューの識別子 (整数、最大10桁)
|
|
| skew_title |
スキューのタイトル (文字、最大100文字)
|
|
| node_ID1 |
節点識別子N1 (整数)
|
|
| node_ID2 |
節点識別子N2 (整数)
|
|
| node_ID3 |
節点識別子N3 (整数)
|
|
コメント
- 移動スキューは、3つの節点で定義された局所座標系を定義します。毎回、これらの節点の実際の位置に基づいて、スキューの実際の方向が計算し直されます。
- 3次元では、スキューは次のように定義されます。
node_ID1およびnode_ID2によって以下が定義されます:
node_ID1およびnode_ID3によって以下が定義されます:
(1)
(2)
- 円筒座標系内のスキューに関する条件を定義する時、円筒座標の軸が節点N1を通ると仮定されます。
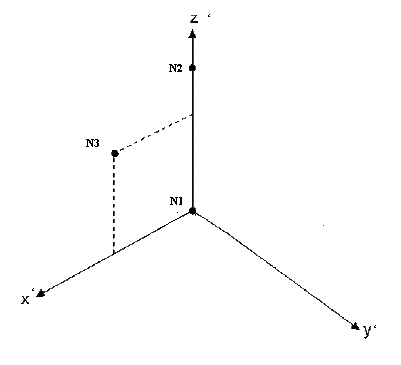
図 1.