傾斜可能な二輪車両と三輪車両
- 傾斜角プロファイルの制御
-
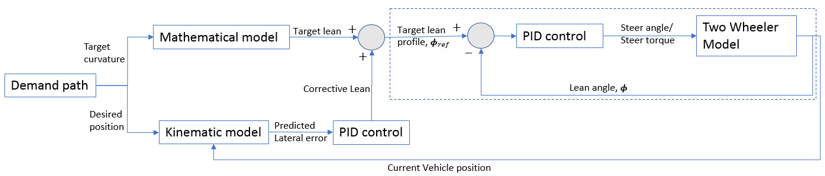
この制御アルゴリズムのユーザー入力は、目標とする傾斜角のプロファイルです。要求傾斜角に到達するために、ステアリング角とステアリングトルクを計算します。この計算にはPIDアルゴリズムを使用します。

ステアリング角またはステアリングトルクと目標とする傾斜角との関係は次の式で表現できます。

 は目標とする傾斜角、
は目標とする傾斜角、 は現在の傾斜角、
は現在の傾斜角、 は選択したDriver出力に応じてステアリング角またはステアリングトルクです。
は選択したDriver出力に応じてステアリング角またはステアリングトルクです。 、
、 、
、 はPID定数です。ステアリング角を制御信号とする場合は、縦速度を二乗した値の逆数を基準として、一定値の角度をパラメータ化します。
はPID定数です。ステアリング角を制御信号とする場合は、縦速度を二乗した値の逆数を基準として、一定値の角度をパラメータ化します。
- 経路追従制御
- この制御アルゴリズムのユーザー入力は、経路参照マーカーを基準にして定義した経路であり、二輪車両はこの経路上を走行する必要があります。ステアリング角またはステアリングトルクは、フィードフォワードアルゴリズムとフィードバックアルゴリズムの組み合わせを使用して計算します。
直近の要求傾斜角の軌道に追従すると同時に、要求経路に対する現在の経路の横方向誤差を除去するように、時間ステップごとに目標傾斜角を計算します。この要求傾斜角を傾斜制御アルゴリズム(前述の「傾斜角プロファイルの制御」で説明しているアルゴリズム)に提供して、ステアリング角またはステアリングトルクを計算します。
-
- ステアリング制御アルゴリズム
-
フィードフォワードアルゴリズムは、要求経路の曲率および先読み時間後の車両に予測される横方向誤差に基づいて動作します。
傾斜角と要求経路の曲率との関係は、重心に作用する横加速度と重力との均衡を図ることによって確立できます。
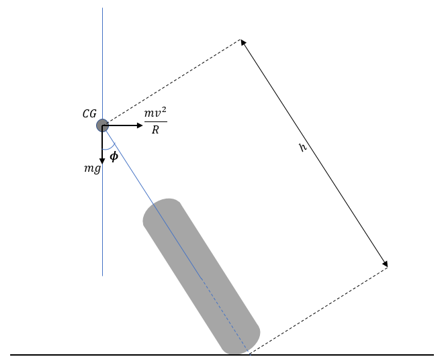
この均衡について解くと次の式が得られます。
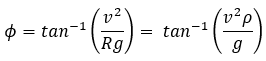
 は車両の縦速度で、
は車両の縦速度で、 は経路の曲率です。
は経路の曲率です。経路の曲率は、「曲率の推定」の説明にあるように推定します。
ホイールの中心におけるジャイロ力を考慮すると、この関係は次のようになります。
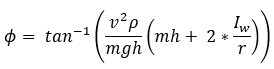
 – 車両の質量 – 車両の縦速度
– 車両の質量 – 車両の縦速度 – ホイールの慣性
– ホイールの慣性 – ホイールの半径
– ホイールの半径 – 車両の重心高さ – 経路の曲率
– 車両の重心高さ – 経路の曲率 - 曲率の推定
- 要求経路上の3点を使用して要求曲率を推定します。先読み時間パラメータ(lat)を使用して、この3点間の間隔を設定します。
経路上の点P1、P2、およびP3を次のように計算します。
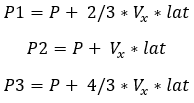
 は参照経路上での車両の現在位置、
は参照経路上での車両の現在位置、 は先読み時間です。
は先読み時間です。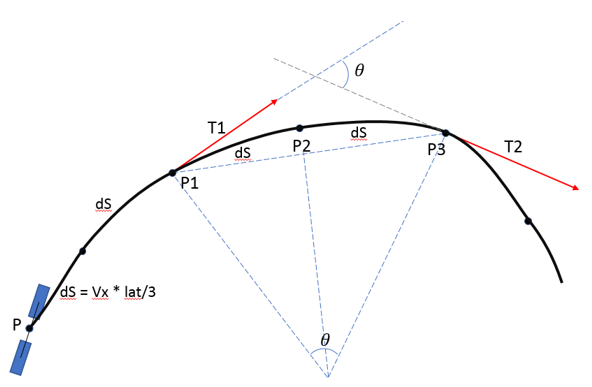
この3点を使用して曲率を推定するには、MotionSolveの5次スプラインユーティリティで補間した経路を使用して、この3点(T1、T2、およびT3)における接線ベクトルを求めます。
これらの接線間の角度を次のように求めます。
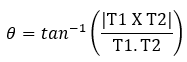
曲率は次のように推定できます。

- 横方向誤差の予測
- 横方向誤差は、先読み時間後の車両の目標位置と予測位置を使用して計算します。
先読み時間後の車両位置を予測するには、運動学二輪モデルの方程式を使用します。
運動学モデルの詳細については、「運動学二輪モデル」をご参照ください。
予測経路を計算するには、先読み時間分だけ運動学方程式を積分します。MotionSolveのスプラインユーティリティを使用したスプライン補間によって経路を取得します。
先読み時間における予測経路と目標経路の差異が誤差となります。

- 曲率が不連続な要求経路の扱い
-
曲率が不連続な経路の例を以下に示します。
- 90度の左折と右折
- 半径が一定のカーブに合流する直線路
- 1車線変更と2車線変更
制御アルゴリズムの円滑な動作を図るには、経路追従制御の要求傾斜が実際は連続している必要があります。実際の路上でも、一定の状態にある二輪車両を別の状態へ連続的に徐々に傾斜させることによってスムーズなコーナリングが可能です。
要求傾斜は経路の曲率に正比例するので、ライダーがたどる経路の曲率は連続している必要があります。つまり、経路曲線の二次導関数が経路上の各点で実際に連続している必要があります。
指定したすべての経路でこの要件を満たすために、経路全体を網羅できる固定距離で経路曲線をサンプリングします。MotionSolveのQUINTIC曲線ユーティリティを使用して、サンプリングした点に5次曲線をフィッティングします。この曲線の特性上、得られる曲線の曲率は経路全体にわたって連続しています。得られた円滑な経路を、新しい要求経路としてAltair Driverに提供します。
経路のサンプリング距離はADFで設定できます。このパラメータのデフォルト値は10 mです。