オブジェクト間の干渉の定義
概要
Fluxでは、同じ位置に複数の形状エンティティが存在する状態に対応できず、ソリッド間の制約が管理されません。したがって、オブジェクトのアセンブリ操作の適用が不可欠です。この自動アセンブリでは、小さいボリュームとフェイスが問題になります。これらの形状によって、後工程でメッシュと解像度にパフォーマンス上の問題が発生することがあります。
解決策を提供するために、バージョン12.2で次のような干渉検出が実装されました:
- インポートプロセス中の検出: CADをインポートするときに自動的に考慮される新しい追加オプション
- モデラー使用中の検出: オブジェクト間の干渉チェックが必要なとき、ただちに使用できる新機能
干渉
干渉はオブジェクトどうしの不具合です。次の2種類の干渉が存在します:
- オブジェクトの一致: フットプリントが共通する2つのオブジェクト
- オブジェクトどうしの衝突: 同じ面積(体積)を占有する2つのオブジェクト
| 干渉のタイプ | ||
|---|---|---|
| 一致 | 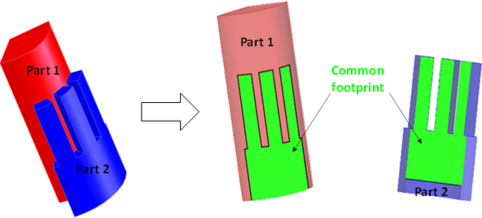 |
|
| 衝突 |  |
修正するための解決策が複数存在することから、衝突を自動的に簡素化することはできません。また、必要な結果を把握しているのはユーザーのみです。したがって、ユーザーが修正措置を選択する必要があります。
|
干渉の例
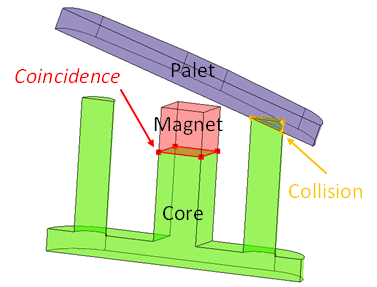
干渉の例:
- 物理的モデルが異なる2つのオブジェクトである磁石と鉄心との一致タイプの干渉
- アセンブリが必要
- 2つのオブジェクトであるパレットと鉄心との衝突タイプの干渉
- ユーザーによる措置(回転、並進移動、ブール演算など)が必要
インポート時の衝突検出
CADのインポートで次の処理が実行されます:
- «Coincidence»タイプの干渉は、アセンブリオプションがYESであれば、そのオプションを使用して自動的に修正されます。
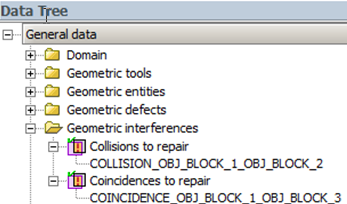
- «Collision»タイプの干渉は、Detection collisionオプションがYESであれば自動的に検出されます。衝突は、データツリーの節点Geometric Interferencesに表示されます。
注:
- オブジェクトAがオブジェクトBと衝突状態にあり、これらのオブジェクトのどちらかに一致タイプの干渉がある場合、関連するオブジェクトはアセンブリされません。一致は永続的です。
- Detection of collisionsオプションを考慮するには、ソリッドアセンブリのオプションをYesにする必要があります。そのようにしないと検出が無効になり、衝突は検出されません。次回の検出では、モデラーでローカル機能のDetection of geometric interferencesを使用してユーザーが手動で検出操作を実行できます(次のブロックをご参照ください)。
干渉の検出: ローカル機能
インポート時に限らず、形状にオブジェクトどうしの干渉があるかどうかをいつでも確認できます。その確認にはDetection of geometric interferences機能を使用します。
モデラーで構築したオブジェクト専用のこのアクションは、Flux標準の形状コンテキストで実行するCheck geometryアクションと同等です。
形状操作Detection of interferencesには次のような方法でアクセスできます:
- メニューから:
- アイコンから:

この干渉検出機能は、モデラーコンテキストを閉じるときに自動的に実行され、修正が必要な干渉がオブジェクト間にある可能性をユーザーに警告します。