MV-7011:Functional Mockup Interface(FMI)を介したActivateとの連成
本チュートリアルでは、FMIを介してActivateと連成するためにMBSモデルをセットアップするプロセスについて学びます。
FMIを活用した連成は、異なるソフトウェアがインタラクティブに互いにデータ交換を行うための1つのプロトコルを定めるもので、これにより、複数のソルバーが互いに連成することが可能となります。
このインターフェースの活用によって、MotionSolveがActivateもしくはFMIスタンダードをサポートするその他のソフトウェアと連成することができます。これを行うために、MotionSolveモデルはまず、MotionSolveモデルを表すスタンドアローンモデリングユニットであるFunctional Mockup Unit(FMU)に変換される必要があります。FMUは、FMIに定められているプロトコルに含まれ、このインターフェースをサポートするソフトウェアによってインポートまたはエクスポートすることが可能です。
MotionSolveは、1-Dシミュレーターなど他のソフトウェアにインポート可能なタイプ“co-simulation”(連成)のFMUをエクスポートすることができます。タイプ“co-simulation”は、MotionSolve FMUがソリューションのそのパートの計算を担う、すなわち、連成が開始された時点でMotionSolveが起動されることを意味します。
本チュートリアルは、下記に必要な手順を説明しています:
- MBSモデルのオープンと検証
- MotionViewからのFMUのエクスポート
- FMUを使用し、Activateを用いた連成解析の実行
- 連成結果のActivateでの確認
本チュートリアルには、クワッドローター(回転翼機)を表すモデルが使用されます。モデルの構造、ローターブレードなどはMotionView/MotionSolveでモデル化され、ローターの水平方向の動きと推力をコントロールするためにローターの回転数を制御するにはActivateが用いられます。風の影響を模倣するために、回転翼機にはロール力が付与されます。シミュレーションの狙いは、ローターがターゲットの高さを達成するよう推力をコントロールすることにあります。
本チュートリアルを首尾よく完了するために、以下のソフトウェアが必要です:
- HyperWorks 2017.1以降
- sT/Activate 2017.1以降
モデルの確認
-
Model-MainツールバーからOpen Modelアイコン
 をクリックします。
ヒント: または、を選択することもできます。
をクリックします。
ヒント: または、を選択することもできます。 -
モデルを確認します。
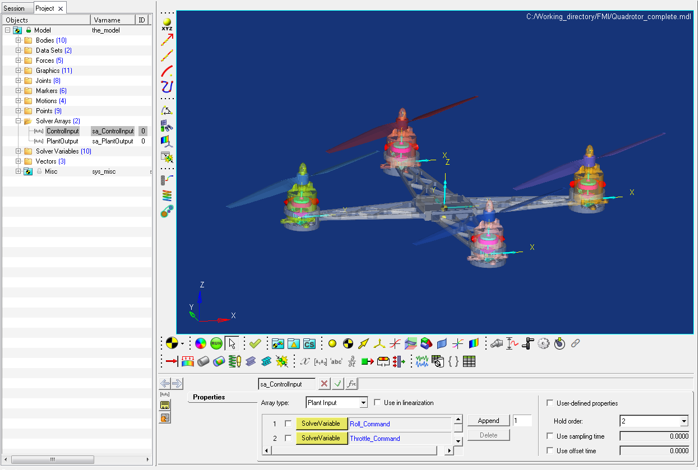
図 1.注: このモデルは、入力(ControlInput)と出力(PlantOutput)を含んで用意されています。出力は、MotionSolveによって環境(Activate)に送られる信号です。入力は、環境からMotionSolveにより受け入れられる信号です。この例では、下記の出力がMotionSolveによって計算され、外部ソルバー(Activate)に渡されます:名称 説明 Roll Angle 全体フレームでの回転翼機のロール角 Altitude 全体フレームでの回転翼機の高さ Pitch Angle 全体フレームでの回転翼機のピッチ角 PosX 全体フレームでの回転翼機のX座標 PosY 全体フレームでの回転翼機のY座標 VX 全体フレームでの回転翼機のX速度 VY 全体フレームでの回転翼機のY速度 MotionSolveにより、外部ソルバーからの以下の入力が期待されます:名称 説明 Roll_Command 回転翼機のロールを制御するための制御信号 Throttle_Command 回転翼機のスロットルを制御するための制御信号 Pitch_Command 回転翼機のピッチを制御するための制御信号
MDLのFMUとしてのエクスポート
-
Standardツールバーから、Export Modelアイコン
 をクリックします。
ヒント: または、を選択することもできます。Export Modelダイアログが表示されます。
をクリックします。
ヒント: または、を選択することもできます。Export Modelダイアログが表示されます。 -
Export as Functional Mockup Unit (FMU)オプションを選択し、Select FMU fileブラウザ
 を使って、FMUのファイル名を
Quadrotor.fmuと設定します。
を使って、FMUのファイル名を
Quadrotor.fmuと設定します。
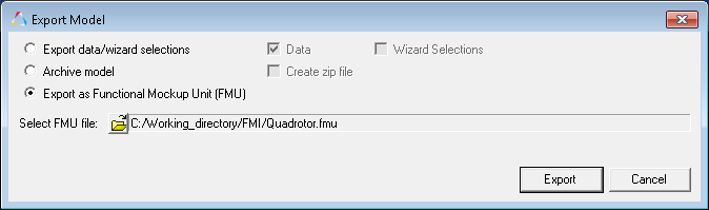
図 2.
ActivateでのFMUのインポート
-
Activateを起動し、Open Modelボタン
 を使って<作業ディレクトリ>からQuadrotor_Control_fmu.scmファイルを開きます。
ヒント: メニューオプションを使ってQuadrotor_Control_fmu.scm ファイルを選択することも可能です。
を使って<作業ディレクトリ>からQuadrotor_Control_fmu.scmファイルを開きます。
ヒント: メニューオプションを使ってQuadrotor_Control_fmu.scm ファイルを選択することも可能です。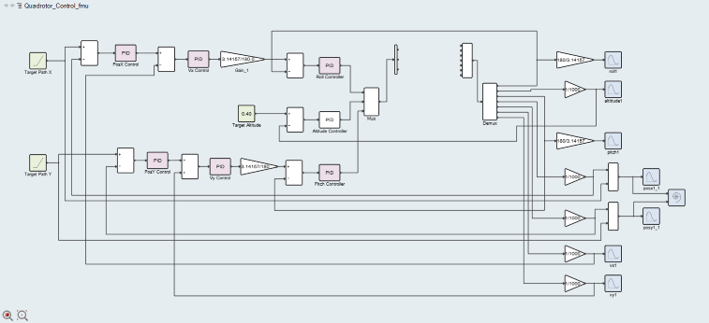
図 3. -
右側のPaletteブラウザでActivate >
CoSimulationをダブルクリックし、FMUブロックをモデルGUIにドラッグ&ドロップします。

図 4.注: 右側にPaletteブラウザが見つからない場合、Menu内のをクリックしてONにします。 -
FMUブロック上をダブルクリックし、FMUを指定します。
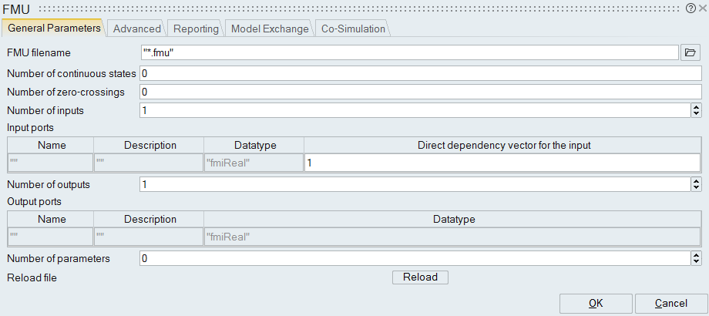
図 5. -
ファイルブラウズボタン
 をクリックし、MotionViewからエクスポートしたFMUを選択します。
注: FMUが読み込まれると、このダイアログ内の他のいくつかの欄が自動的に満たされます。
をクリックし、MotionViewからエクスポートしたFMUを選択します。
注: FMUが読み込まれると、このダイアログ内の他のいくつかの欄が自動的に満たされます。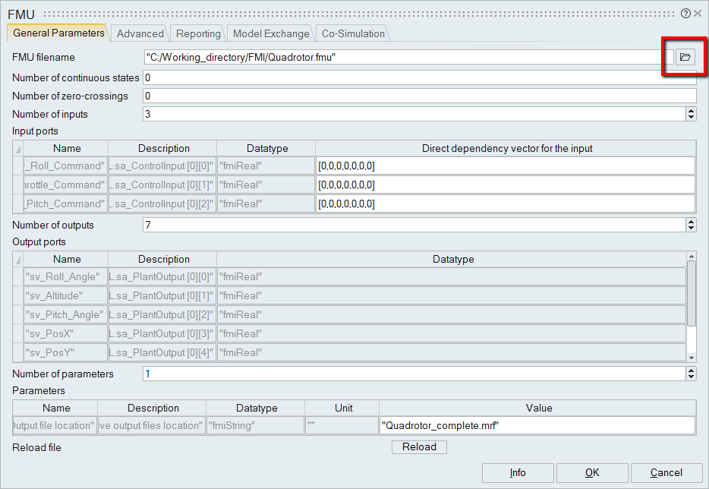
図 6.ヒント: “Output file location”という名称のパラメータ内のテキストを変更することによって、MotionSolveからの出力ファイル(.mrf、.abf、.h3dなど)を指定することができます。 -
OKをクリックし、FMUを選択して閉じます。
FMUブロックは、FMUに基づいて、入力および出力の正しい数を反映するよう変わります。

図 7.ヒント: 入力名と出力名が見えるようになるまで、FMUブロックのサイズを変更することができます。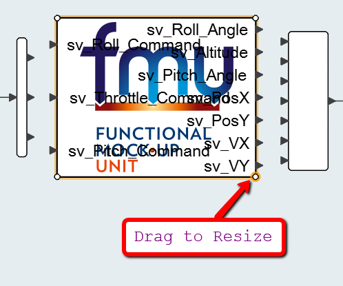
図 8. -
コネクターポートを介してFMUブロックをモデルの残りに接続します。
接続後、モデルは下図に示すようになるはずです。
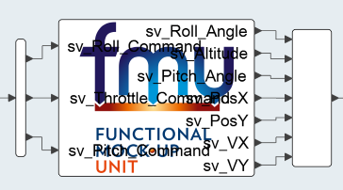
図 9.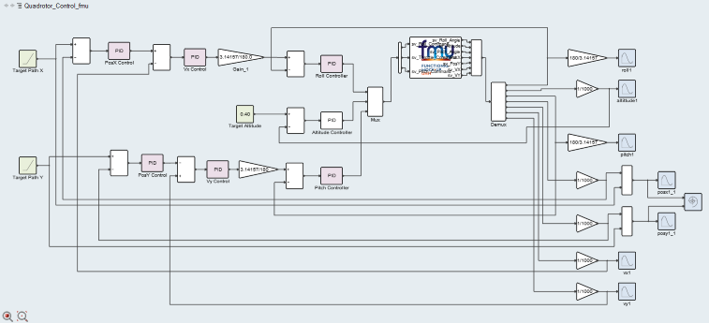
図 10.
Activateモデルの実行
-
オプションを使用し、MotionSolveライセンスをMotionSolveライセンスモジュールの場所に設定します。たとえば、C:/Program Files/Altair/2020/hwsolvers/common/bin/win64
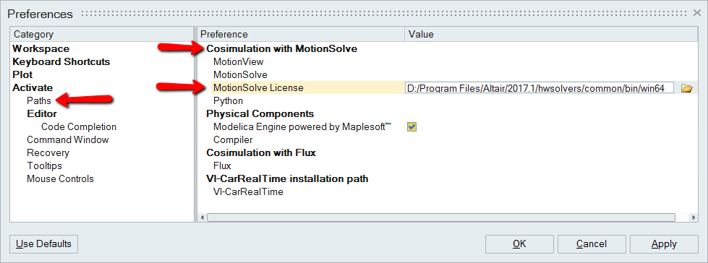
図 11. -
Run the Simulationボタン
 をクリックし、シミュレーションを開始します。
注: ActivateがFMUを起動し、FMUはパッケージ化されたMDLからXMLを生成し、それを用いて連成シミュレーションを開始します。連成シミュレーションは、プロセス間通信(IPC)をベースとするため、MotionSolveは新しいスレッドで開始されます。
をクリックし、シミュレーションを開始します。
注: ActivateがFMUを起動し、FMUはパッケージ化されたMDLからXMLを生成し、それを用いて連成シミュレーションを開始します。連成シミュレーションは、プロセス間通信(IPC)をベースとするため、MotionSolveは新しいスレッドで開始されます。
結果の確認
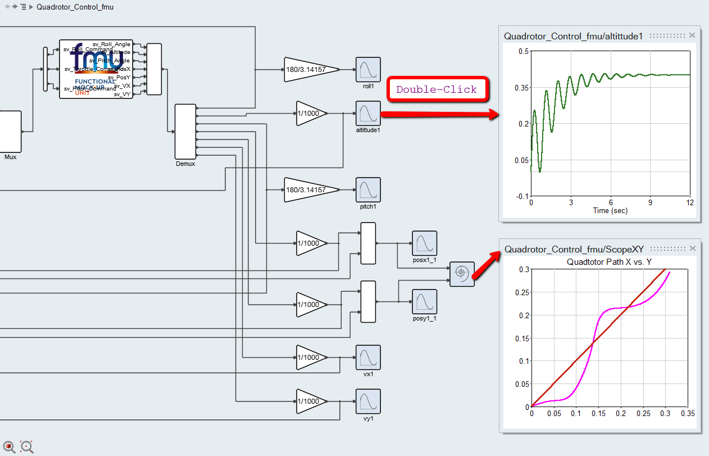
図 12.
altittude1スコープは、回転翼機の高さを示します。約8秒後、クワッドローターは目標とした高さで安定したと見受けられます。
ScopeXYはクワッドローターのターゲットのX、Yパス(赤色) vs. 実際のX、Yパス(ピンク色)を示します。
MotionSolve出力ファイル群(MRF、ABF、PLT、H3Dなど)から結果を取得することができます。また、システムの監視のみに使用する式をMotionSolveモデル内に作成することも可能です。