MV-7021:MotionSolve/EDEMの連成シミュレーション
本チュートリアルでは、MotionViewを介したMotionSolveとEDEMの連成のセットアップと実行について学びます。
MotionSolveは、先進のバルク材挙動シミュレーションツールであるAltair EDEMとインターフェースをとる機能を有しています。EDEMは、砂、細礫、錠剤、草、岩石といった粉体の挙動を解析する離散要素法技術(DEM: Discrete Element Method)をベースとしています。 この解析法の詳細については、https://www.altair.com/edem/、およびMotionSolveユーザーズガイド内のMotionSolveでの離散要素法シミュレーショントピックをご参照ください。
本チュートリアルは、AltairのMotionSolve/MotionViewとEDEM両方の最低限の知識を前提としています。
- 必要条件
- MotionSolveとEDEMとの間で首尾よく連成を行うには、以下の条件が必要です:
ソフトウェア バージョン HyperWorks 剛体連成は、2019.1以降 弾性体連成は2021以降
EDEM 剛体連成は、2019.1以降 弾性体連成は2020.3.1以降
PM Flex Tire PM Flex Tire連成は2021.1以降 PM Flex Tireは、Altair Partner Allianceを通じてご利用可能です。
注: EDEMはHyperWorksと同じ場所にインストールすることをお勧めします(デフォルト:C:/Program Files/Altair/2022)。EDEMが別の場所にインストールされている場合、ジオメトリ転送や連成シミュレーションなどの機能を有効に使うために、 ~install_location/EDEM/binと ~install_location/EDEM/libを環境変数PATHに追加してください。
ここで説明する手順とオプションは、HyperWorksとEDEM バージョン 2022 リリースに対応するものです。
- 問題の定義
- この問題は、中心軸回りにのみ回転が可能なホイールから成ります。ホイールのブレードに多数の粒子が衝突し、それを回転させています。ホイールはMotionSolveでモデル化され、粒子およびホイールと粒子との相互作用はEDEMでモデル化されます。最初に、剛体ホイールと粒子の相互作用を設定します。その後、ホイールを弾性体に置き換え、弾性体と粒子の相互作用を確認します。
Motionモデルのセットアップ
-
StandardツールバーでImport Geometry
 をクリックします。
をクリックします。
-
自分の<作業ディレクトリ>からwheel.stepファイルを探して選択し、Openをクリックします。
ホイール形状がMotionViewにインポートされます。
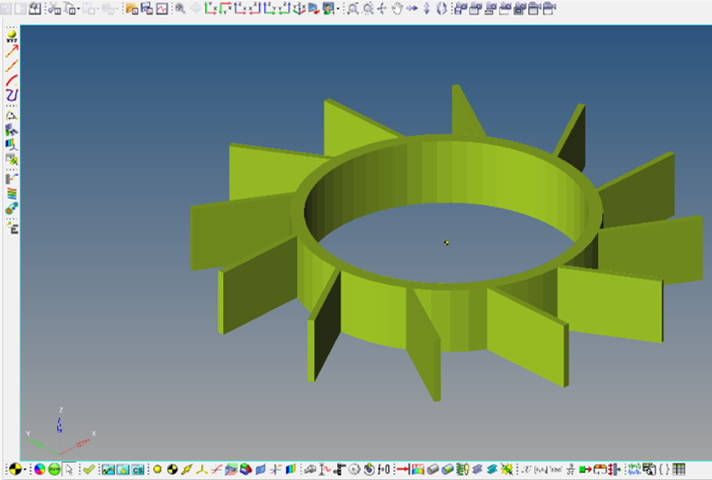
図 1. ホイール形状のインポート後のMotionViewでのモデル -
OriginのPointコレクターをダブルクリックして、に進み、wheel-Inertia Props-cgを選択します。
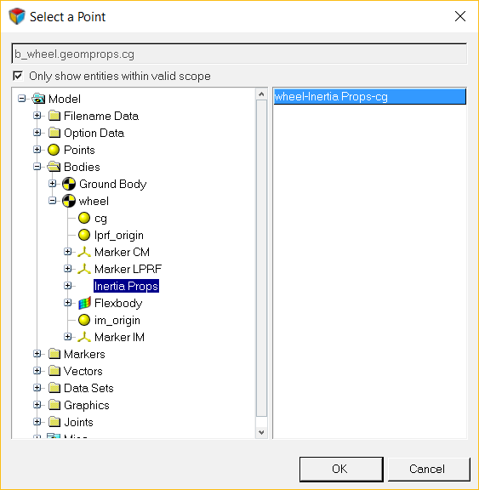
図 2. Pointダイアログを選択し、ホイールボディのCGを選択 -
Project Browserで、Solver Gravityデータセットを選択し、Y componentを-9810に設定します。Z componentを0.0に設定します。
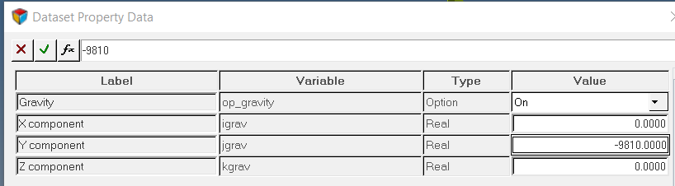
図 3. データセット - Solver Gravity -
 でモデルをwheel.mdlとして保存します。
でモデルをwheel.mdlとして保存します。
EDEMモデルのセットアップ
- バルク材料の定義
- 粒子の形状の定義
- 装置材料の定義
- 装置形状の定義
- 仮想形状 / 粒子ファクトリーの定義
- 環境パラメータの定義
- シミュレーションオプションの定義
-
Physical Radius (m)を0.1に設定します。
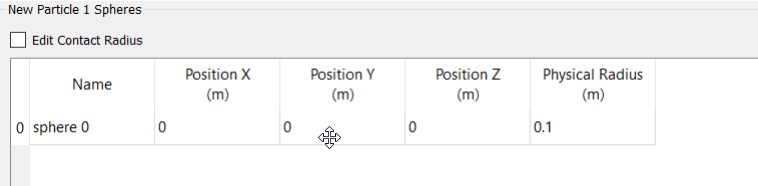
図 4. 粒子のSphere Library- オプション:
粒子サイズの変更した場合、Viewパネルの
 を選択して粒子のビューをリセットすることが可能です。
を選択して粒子のビューをリセットすることが可能です。
- オプション:
粒子サイズの変更した場合、Viewパネルの
-
Solids density(
 )を7860に、Shear Modulus(G)を80.77e9に変更します。
)を7860に、Shear Modulus(G)を80.77e9に変更します。
-
上部のツールバーで、Start Coupling
Serverアイコンをクリックして、連成サーバーをオンにします。
図 5. 連成サーバーをオンに -
MotionViewに戻って、Bulk Material InterfaceツールバーのEDEM Subsystemアイコン
 をクリックします。
をクリックします。
図 6. EDEM Subsystemツールバー -
でモデルを保存します。
-
インポートプロセスが完了したら、ツールバーのViewセクション内でドロップダウンメニューをクリックし、-Zビューを選択してズームインします。
図 7. ビュー選択グラフィック画面は下に示すように見えるはずです: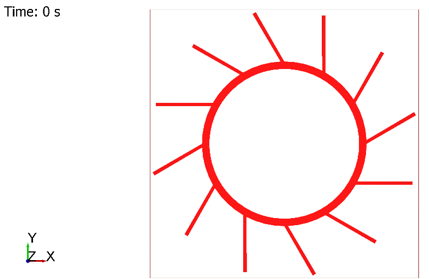
図 8. EDEMでのホイール形状Creatorツリー内のGeometriesの下にあるコンポーネントを注視します。ホイールには、MotionViewでのボディ名と同様に‘wheel’という名前が付けられます。
次に、粒子ファクトリーの形状をセットアップします。 -
TypeをVirtualに変更します。
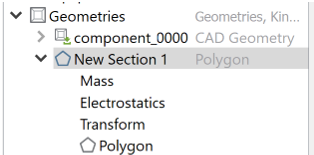
図 9. 粒子ファクトリーの多角形形状 -
'New Section 1'の下でPolygonを選択し、以下のプロパティを設定します。
Length Edge A 0.2 Edge B 0.2 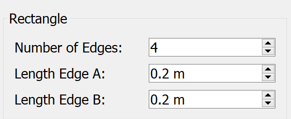
図 10. 多角形のプロパティ -
Positionでbccを設定します。
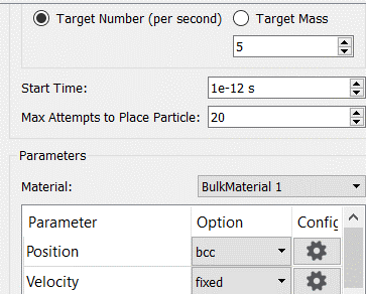
図 11. ファクトリーの追加 -
ギアのアイコン
 をクリックし、Position - Lattice Parametersダイアログを表示させます。
をクリックし、Position - Lattice Parametersダイアログを表示させます。
- Start Pointで、XとYをそれぞれ1.6と1.7に設定します。
- 残りの欄はデフォルト値に設定されたままにします。
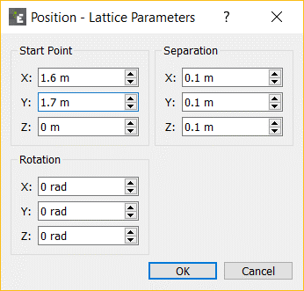
図 12. Position - Lattice Parameters -
Creatorツリーで、Environmentを選択して、Gravity – Yを-9.81に設定します。
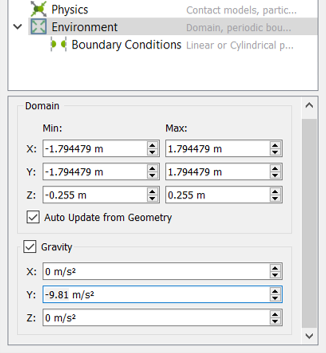
図 13. 重力の設定
EDEMでのシミュレーションのセットアップ
-
Simulatorに切り替えます。

図 14. ツールバー上のSimulatorアイコン -
Estimate Cell Sizeをクリックし、与えられたセルサイズを受け入れます。
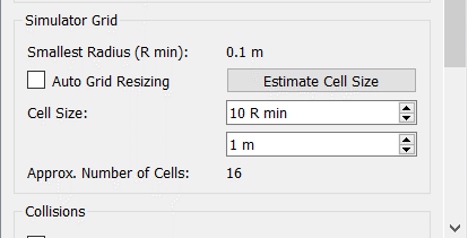
図 15. セルサイズの推定
シミュレーションの実行
-
Runパネル
 に移動します。
に移動します。
-
Runボタンをクリックして、シミュレーションを開始します。
MotionSolveが起動され、EDEM側でもシミュレーションが始まります。シミュレーションプロセスは、EDEMでも見ることができます。
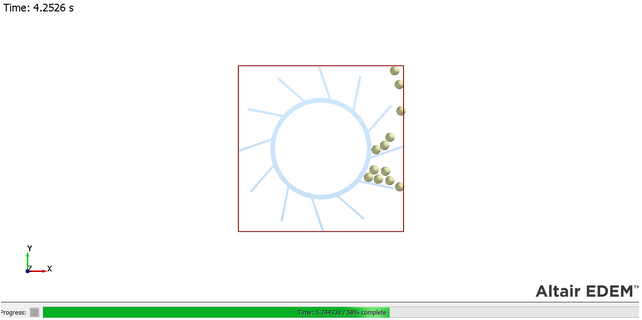
図 16. シミュレーション中のEDEMグラフィックスクリーン -
EDEMで、シミュレーションの進行に合わせてグラフィックス表示を更新するには、最上部のツールバーのAuto updateをクリックします。

図 17. Auto update
ポスト処理
EDEMで相互作用するコンポーネントについて、EDEMでAnalystページからアニメーション表示することができます。
-
ツールバーのAnalystアイコンをクリックします。

図 18. ツールバー上のAnalystアイコン -
下部のツールバーでアニメーションをリセットします。

図 19. EDEMのAnimationバー -
Animate Forwardsアイコン
 をクリックします。
をクリックします。
-
 HyperViewでアニメーションを表示します。
HyperViewでアニメーションを表示します。
- MotionView Runパネルで、Animateをクリックして、MotionSolve H3D結果をHyperViewウィンドウに読み込みます。
- HyperViewで、Load ModelパネルのOverlayチェックボックスをアクティブにします。
- Open Modelファイルブラウザを使用して、作業ディレクトリからwheel_edem.h3dファイルを探して選択します。
- Applyをクリックします(ポップアップ警告メッセージに対してYesと答えます)。
-
Start/Pause Animationボタン
 を使用してアニメーション表示します。
を使用してアニメーション表示します。
弾性体の連成
対応するホイールの弾性体H3Dファイルが用意されています。
-
弾性体には、以下の特徴があります:
- ローターの要素には、材料特性としてSteelが割り当てられています。
- ブレードの要素には、Steelの10%の弾性係数と密度の材料特性を使用しています。
- 中心の節点は剛体(RBE2要素)によってローターの内面の節点と接続されています。
- 適切なモード表現のために、中心節点と各ブレード上の節点(任意)がインターフェース節点として選択されています。
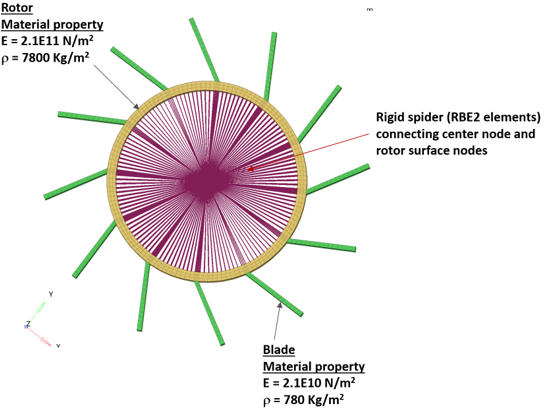
図 20.