OS-T:1960 ポイント-可変形曲線ジョイント定義
本チュートリアルでは、フックとフレキシブルなケーブルのマルチボディ動的解析(シミュレーションタイプ: 時刻歴応答解析)がOptiStructを用いて実行されます。
まず、既存の有限要素モデルがHyperMeshに読み込まれます。残りの設定(ジョイントの作成、荷重定義など)は、HyperMeshで実施します。フレキシブルケーブルモデルの大変形のポスト処理にはHyperViewが用いられます。
図 1. ケーブル上のフックの回転
図 1. ケーブル上のフックの回転
JOINTS(固定、PTDCV)、PFBODY、 PRBODY、MBDCRVとマルチボディ動的サブケースの生成方法について学びます。
図 2. HyperMeshでのモデル
図 2. HyperMeshでのモデル
フレキシブルケーブルは50の異なるCBAR要素(PFBODY)からなり、このフレキシブルボディの端部は固定ジョイントを用いて 地面(GROUND)に結合されています。
フック(PRBODY)は外部グラフィックでフレキシブルケーブルに PTDCVジョイントで結合されています。
HyperMeshの起動とOptiStructユーザープロファイルの設定
モデルのオープン
モデルのセットアップ
剛体(PRBODY)の生成
- Analysisページからパネルbodiesをクリックします。
- createサブパネルを選択します。
- body=欄にHookと入力します。
- type=をクリックしPRBODYを選択します。
- プロパティセレクターを使って、Hookを選択します。
- nodesをダブルクリックし、by idを選択して14399と入力します。
- createをクリックします。
- returnをクリックします。
弾性体(PFBODY)の生成
-
number of modesをnmodes=に設定し、15と入力します。

図 3.
地面のボディ(GROUND)の生成
注: 地面のボディを定義する際に、プロパティの選択は必要とされません。
- Analysisページからパネルbodiesをクリックします。
- createサブパネルを選択します。
- body=欄にGroundと入力します。
- type=をクリックしGROUNDを選択します。
- nodesをダブルクリックし、by idを選択して14397, 14398と入力します。
- createをクリックします。
可変形曲線の定義
図 4.
ジョイントの作成
ここでは、PTDCVジョイントを含む全ての必要なジョイントを作成します。
-
PTDCVジョイントを作成します。

図 5.
荷重コレクターの作成
モデルに与える重力荷重とマルチボディシミュレーション用パラメータを指定するためのMBSIMバルクデータカードをこの演習で作成します。
-
以下に示す値を入力します。
図 6. -
もう1つの荷重コレクターを作成します。
-
以下に示す値を入力します。
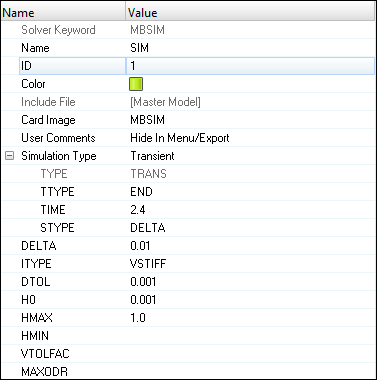
図 7.
-
以下に示す値を入力します。
荷重ステップの作成
ジョブのサブミット
-
AnalysisページからOptiStructパネルをクリックします。
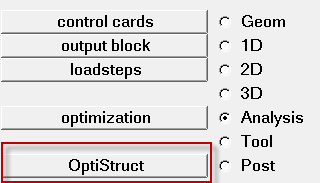
図 8. OptiStructパネルへのアクセス
そのディレクトリに書かれるデフォルトのファイルは:
- flex_cable.html
- 問題の定式と解析結果のサマリーに関する解析のHTMLレポート。
- flex_cable.out
- ファイルの設定、最適化問題の設定、実行に必要なRAMおよびディスクスペースの推定量、各最適化反復計算の情報、解析時間等、特定の情報を含むOptiStructの出力ファイル。ワーニングおよびエラーに関しては、このファイルを確認すること。
- flex_cable.h3d
- HyperViewバイナリ結果ファイル。
- flex_cable.res
- HyperMeshバイナリ結果ファイル。
- flex_cable.stat
- 解析のプロセスの間のそれぞれのステップでのCPU情報を提供する、解析のプロセスの要約。
結果の表示
このステップでは、HyperMeshのOptiStructパネルで起動するHyperView内で結果を可視化します。
HyperViewは有限要素解析(FEA)、マルチボディシステムシミュレーション、ビデオと工学データのための完全なポストプロセッシングと表示の環境です。
-
Contour panelツールバーアイコン
 をクリックします。
をクリックします。
-
playback controlsの横のパネル内にあるAnimation Controlsを使ってアニメーションを開始 / 停止します。

図 9.-
Animate Modeが
 (Transient)にセットされていることを確認します。
(Transient)にセットされていることを確認します。
- Start/Pause Animationアイコンをクリックし、アニメーションを開始します。
- アニメーションの再生中に、一番下のスライダを使って、アニメーションのスピードをコントロールします。
- Start/Pause Animationアイコンを再度クリックし、アニメーションを停止します。
-
Animate Modeが