OS-T:1910 弾性体コネクティングロッド付シリンダークランクの動解析
本チュートリアルでは、剛体クランク、弾性体コネクティングロッドおよび剛体スライディングブロックで構成されたスライダークランクモデルを扱います。この解析では、高速で動くシステムの挙動と弾性体コネクティングロッドの応力を確認することが目的です。
本チュートリアルには、HyperMeshでPRBODY(剛体定義)、PFBODY(弾性体定義)およびJOINTを作成する方法が含まれています。
ここでは既存の有限要素モデルを使用します。
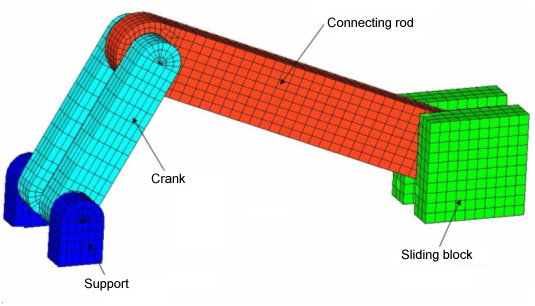
図 1.
図 1.
HyperMeshの起動とOptiStructユーザープロファイルの設定
モデルのオープン
モデルのセットアップ
PRBODYの作成
- Analysisページからパネルbodiesをクリックします。
- createサブパネルを選択します。
-
supportコンポーネントについて、PRBODYを定義します。
- body=欄にsupportと入力します。
- type=をクリックしPRBODYを選択します。
- プロパティセレクターを使って、supportを選択します。
- createをクリックします。
-
crankコンポーネントについて、PRBODYを定義します。
-
nodesセレクターを使って、コネクティングロッドとクランク間のRBE2スパイダーの中央節点(ID 25231)を選択します。
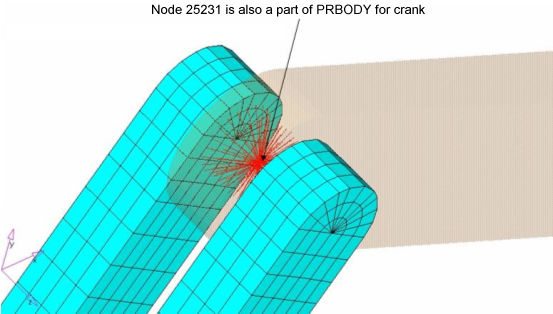
図 2.
-
nodesセレクターを使って、コネクティングロッドとクランク間のRBE2スパイダーの中央節点(ID 25231)を選択します。
-
blockコンポーネントについて、PRBODYを定義します。
-
nodesセレクターを使って、コネクティングロッドとブロック間のRBE2スパイダーの中央節点(ID 25232)を選択します。
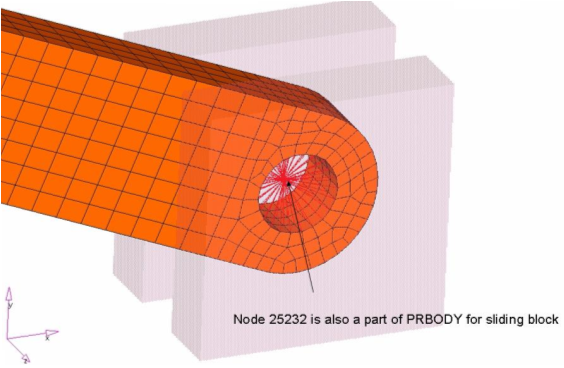
図 3.
-
nodesセレクターを使って、コネクティングロッドとブロック間のRBE2スパイダーの中央節点(ID 25232)を選択します。
- returnをクリックします。
弾性体(PFBODY)の生成
-
elemsセレクターを使って、コネクティングロッドの内側の穴のRBE2要素2つを選択します。
ヒント: 別に、‘elems by id’と入力ID 18795および18796を使って、2つのRBE2要素を選択することもできます。
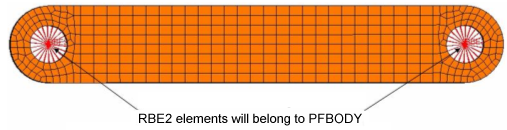
図 4. -
number of modesをnmodes=に設定し、10と入力します。

図 5.
ジョイントの作成
| ジョイントのタイプ | 並進自由度の除去 | 回転自由度の除去 | 自由度の除去総数 |
|---|---|---|---|
| 回転(Revolute) | 3 | 2 | 5 |
| 固定(Fixed) | 3 | 3 | 6 |
| 並進(Translational) | 2 | 3 | 5 |
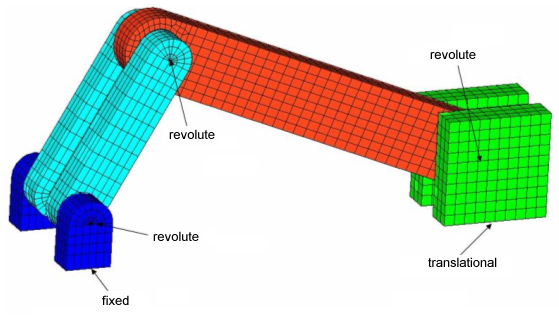
図 6.
-
グラウンドとサポート間に固定ジョイントを作成します。
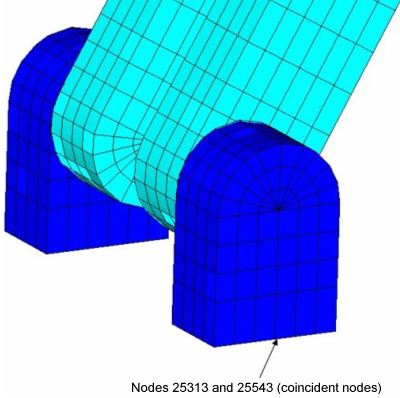
図 7. -
サポートとクランク間に回転ジョイントを作成します。
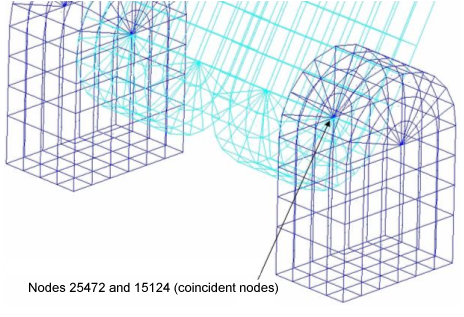
図 8. -
クランクとコネクティングロッド間に回転ジョイントを作成します。
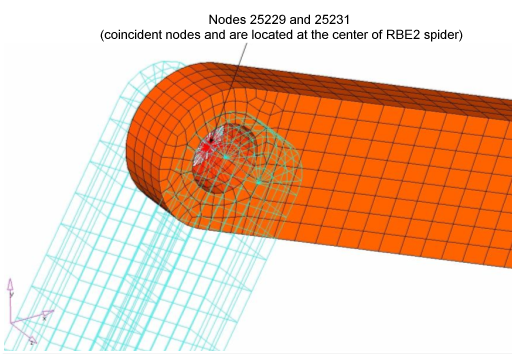
図 9. -
コネクティングロッドとスライディングブロック間に回転ジョイントを作成します。
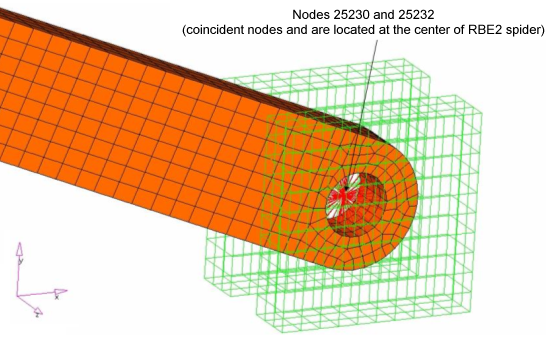
図 10. -
スライディングブロックとグラウンド間に並進ジョイントを作成します。
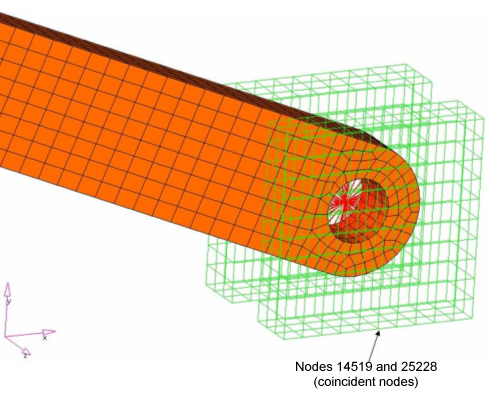
図 11.
DTIとUNITSの作成
-
単位系を、図 12に示すとおり定義します。

図 12.
荷重コレクターの作成
モデルに与える重力荷重とマルチボディシミュレーション用パラメータを指定するためのMBSIMバルクデータカードをこの演習で作成します。
-
以下に示す値を入力します。
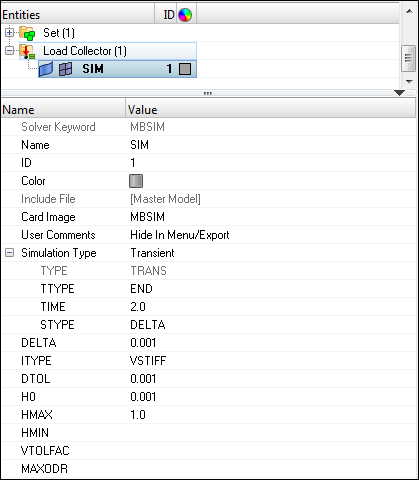
図 13. -
もう1つの荷重コレクターを作成します。
-
以下に示す値を入力します。
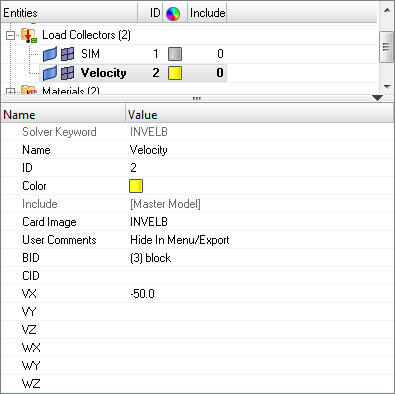
図 14.
-
以下に示す値を入力します。
荷重ステップの作成
ジョブのサブミット
-
AnalysisページからOptiStructパネルをクリックします。
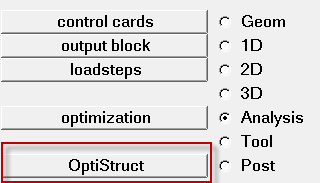
図 15. OptiStructパネルへのアクセス
ランダム応答解析特有の以下のファイルも出力されます。
- slider_crank_complete_mbd.abf
- バイナリプロッティングファイル。
- slider_crank_complete_mbd.h3d
- バイナリ結果ファイル(モーダル結果)
- slider_crank_complete_mbd.log
- ジョイントおよびマーカー、シミュレーション等、MBD解析特定の情報を含むOS-Motionからのログファイル。
- slider_crank_complete_mbd.mrf
- プロッティング用のバイナリ結果ファイル。
- slider_crank_complete_mbd.xml
- .xmlフォーマットでのモデルファイル – ソルバー中間入力デック。
結果の表示
このステップでは、HyperMeshのOptiStructパネルで起動するHyperView内で結果を可視化します。
HyperViewは有限要素解析(FEA)、マルチボディシステムシミュレーション、ビデオと工学データのための完全なポストプロセッシングと表示の環境です。
-
Contour panelツールバーアイコン
 をクリックします。
をクリックします。
-
playback controlsの横のパネル内にあるAnimation Controlsを使ってアニメーションを開始 / 停止します。

図 16.-
Animate Modeが
 (Transient)にセットされていることを確認します。
(Transient)にセットされていることを確認します。
- Start/Pause Animationアイコンをクリックし、アニメーションを開始します。
- アニメーションの再生中に、一番下のスライダを使って、アニメーションのスピードをコントロールします。
- Start/Pause Animationアイコンを再度クリックし、アニメーションを停止します。
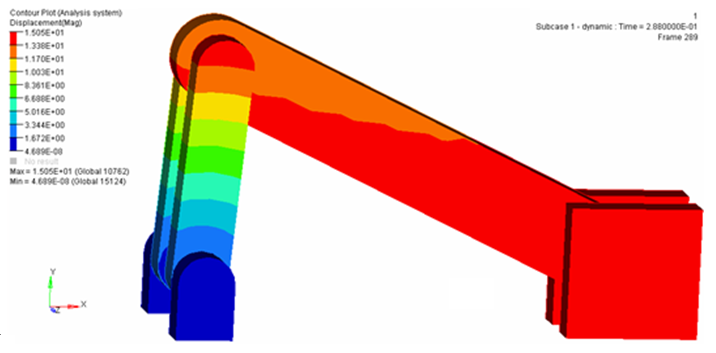
図 17. -
Animate Modeが
-
Start/Pause Animationアイコンをクリックし、アニメーションを開始します。
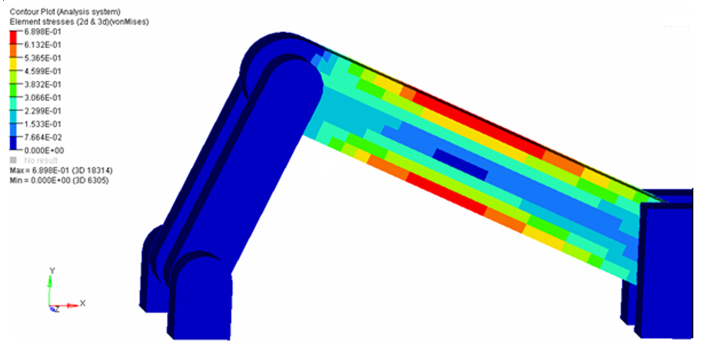
図 18.