ブロックフォーマットのキーワード 移動フレームを記述します。参照フレームに対する相対的な移動です。移動フレーム定義は、/FRAME/MOVとは異なります。 8
フォーマット
| (1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
| /FRAME/MOV2/frame_ID |
| frame_title |
| node_ID1 |
node_ID2 |
node_ID3 |
|
|
|
|
|
|
|
定義
| フィールド |
内容 |
SI 単位の例 |
| frame_ID |
参照フレーム識別子は、すべてのスキュー識別子と異なる必要があります。 (整数、最大10桁)
|
|
| frame_title |
参照フレームのタイトル (文字、最大100文字)
|
|
| node_ID1 |
節点識別子N1 (整数)
|
|
| node_ID2 |
節点識別子N2 (整数)
|
|
| node_ID3 |
節点識別子N3 (整数)
|
|
コメント
- 移動参照フレームを
とします。
- 時間tごとに、フレームの位置と方向を、元の位置
および回転(方向)マトリックス
によって決定します。
-
を、
の瞬間回転速度とします。
- 時間tごとに、フレームを基準とするポイントMの局所座標系
は、全体座標系の座標
に以下のように関連付けられます:(1)
- フレームを基準とする時間0とt間のMの相対変位
は、全体座標系における変位に以下のように関連付けられます:(2)
- フレームを基準にするMの相対速度は、全体座標系における速度に以下のように関連付けられます:(3)
ここで、
は、駆動速度、すなわち時間tにおけるMに一致し、参照フレームに対して固定されたポイントの速度です。
- フレームMを基準にするMの相対加速度は、全体座標系における加速度に以下のように関連付けられます:
(4)
ここで、
-
- 駆動加速度
-
- コリオリ力による相対加速度
- 移動参照フレームは、参照フレームの位置と方向が時間によって変化し、N1、N2、N3によって定義されます。
フレームの原点は、N1の位置によって定義されます。
node_ID1およびnode_ID2によって以下が定義されます:
node_ID1および
node_ID3によって以下が定義されます:
(5)
(6)
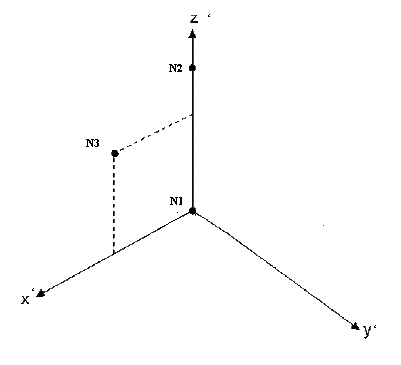
図 1.
参照フレーム識別子は、すべてのスキュー識別子と異なる必要があります。