/FRAME/FIX
ブロックフォーマットのキーワード フレームを記述します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /FRAME/FIX/frame_ID/unit_ID | |||||||||
| frame_title | |||||||||
| Ox | Oy | Oz | |||||||
| X1 | Y1 | Z1 | |||||||
| X2 | Y2 | Z2 | |||||||
定義
| フィールド | 内容 | SI 単位の例 |
|---|---|---|
| frame_ID | 参照フレームの識別子。 (整数、最大10桁) |
|
| unit_ID | 単位識別子 (整数、最大10桁) |
|
| frame_title | 参照フレームのタイトル (文字、最大100文字) |
|
| Ox | フレーム原点O’のX座標 (実数) |
|
| Oy | フレーム原点O’のY座標 (実数) |
|
| Oz | フレーム原点O’のZ座標 (実数) |
|
| X1 | 右記のフレーム軸のX成分;
(実数) |
|
| Y1 | 右記のフレーム軸のY成分;
(実数) |
|
| Z1 | 右記のフレーム軸のZ成分;
(実数) |
|
| X2 | 右記の軸のX成分;
‘ (実数) |
|
| Y2 | 右記の軸のY成分;
(実数) |
|
| Z2 | 右記の軸のZ成分;
(実数) |
コメント
- 参照フレーム識別子は、すべてのスキュー識別子と異なる必要があります。
- 参照フレームは固定され、その方向は および によって定義されます。任意の長さのベクトルを指定できます。
- 入力は
軸および
軸ですが、X’軸は次のように計算されます:
(1) は次のように再計算されます:(2) したがって、新しい参照フレームは 、 '、 によって定義されます。
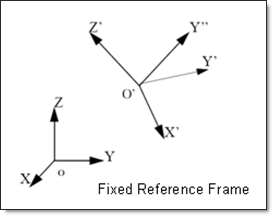
図 1.