RD-E:2100 カム
カムシャフトのモデル化で、エンジンの回転移動を取り込んでインテークとエギゾーストバルブ動作のための線形移動への変換が検討されます。
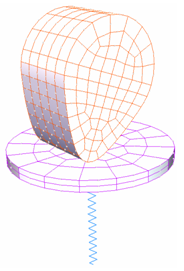
図 1.
使用されるオプションとキーワード
- 線形 / 2次要素、2次曲面接触
- BRIC20要素(/BRIC20)
- SHEL16要素(/SHEL16)
- 軸周りの初速度(/INIVEL/AXIS)
- スプリング要素(/PROP/TYPE4 (SPRING))
- ペナルティ / Lagrange接触インターフェース(/INTER/LAGMUL/TYPE16および/INTER/LAGMUL/TYPE7)
- 剛体:カムに一定角速度を与えるため、剛体が内部節点に対して図 2に示すように生成されます。メイン節点はカムシャフトの軸に移動します。 バルブヘッドをスプリングに付けるため、もう1つの剛体が生成されてスプリングのない力を複数の節点に分配します。
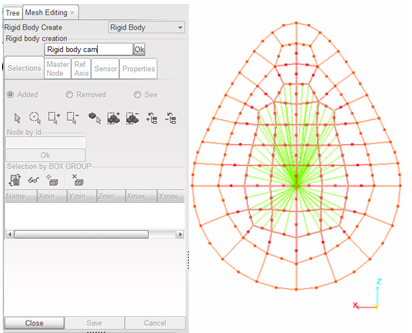
図 2. 剛体カム - 境界条件:
- カムのメイン節点は、Y軸を中心とした回転を除いて拘束されています。
- バルブのメイン節点は、Z軸方向の並進を除いて拘束されています。
- スプリングの一端はバルブに対して結合され、他は固定されます。
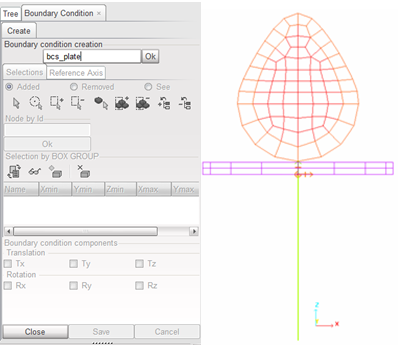
図 3. バルブの境界条件
- 強制速度:剛体のメイン節点に回転速度314rad/sを適用します。速度は時間のセンサーで短い遅れ時間(Tdelay =0.0002s)でアクティブにされます。このセンサーは初速度と強制速度を同時に与えるのを避けるために必要です。
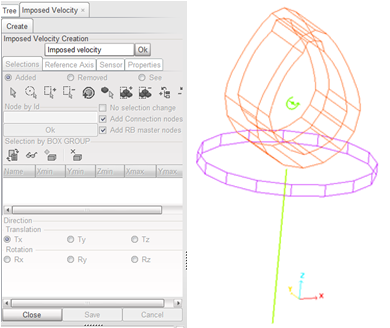
図 4. 強制速度 - 初速度: 剛体のメイン節点を含むすべてのカムの節点に初期回転速度を適用します。原点(回転の中心)とオリエンテーションベクトルを定義する必要があります。
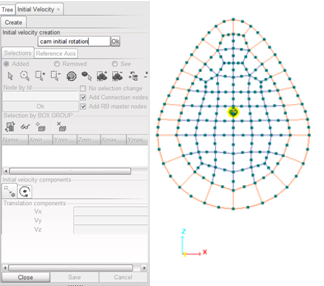
図 5. 初速度 - インターフェース:TYPE16インターフェースで、2次メインサーフェスと節点グループとの接触をシミュレートします。曲面と平面との接触の場合は、曲面をメインサーフェスとして定義し、平面パートの節点をセカンダリとします。
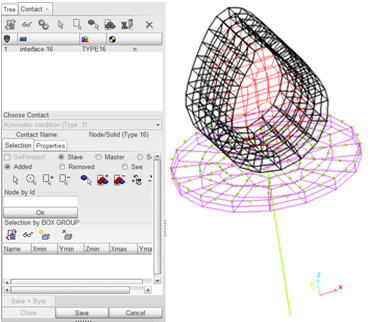
図 6. インターフェースTYPE6TYPE7インターフェースはペナルティ法またはLagrange乗数法のどちらかで機能します。その基本的な定式化では、2つの多面体のサーフェス間の接触をシミュレートします。Lagrange乗数法の使用で、その運動条件をギャップの導入なしに厳密に満足させることができます。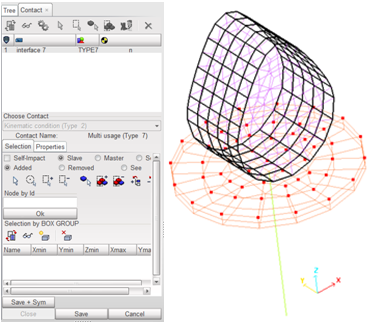
図 7. インターフェースTYPE7
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
モデル概要
平面と曲面の間の接触のモデル化には多面体の曲面を用います。問題の形状と曲面に適合する、インターフェース7と16が記述され、比較されます。
- カムは長さ36mmで、最大幅14mm、厚さ18mmです。
- バルブは直径44mmで厚さ3mmです(図 8)。
- スプリングは長さ40mmです。
以下の単位系が用いられます: mm, s, kg, mN , KPa
- 材料特性
- 初期密度
- 7.8 x 10-06 Mkg/l
- ヤング率
- 2.1 x 10+08 KPa
- ポアソン比
- 0.3
- 降伏応力
- 20000 KPa
- 硬化パラメータ
- 40000 KPa
- 硬化指数
- 0.5
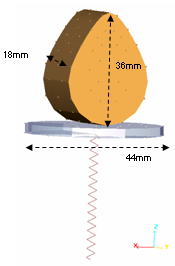
図 8. 問題の形状
モデリング手法
この例題で取り上げられた問題は平面と曲面の間のインターフェースのモデル化です。このケースでは2次要素の使用が最も適切です。
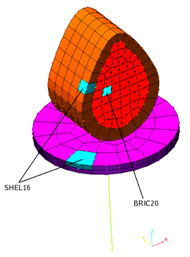
図 9. BRIC20とSHEL16メッシュ
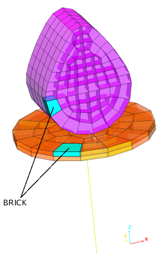
図 10. BRICK要素メッシュ
| l-l0 (mm) | -40 | 0 | 50 |
| Fspring 1 (mN) | -1.5 e+06 | -0.3 e+06 | 1.2 e+06 |
| Fspring 2 (mN) | -0.75 e+06 | -0.15 e+06 | 0.6 e+06 |
結果
最初に、問題の運動学的結果に焦点を当てます。ここでは、剛体のバルブのメイン節点における速度と加速度について得られた結果を比較します。
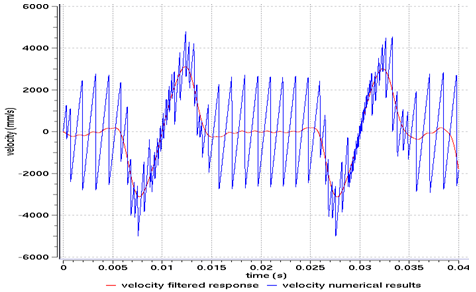
図 11. ペナルティ法を用いたTYPE7インターフェースでのメイン節点バルブの鉛直速度
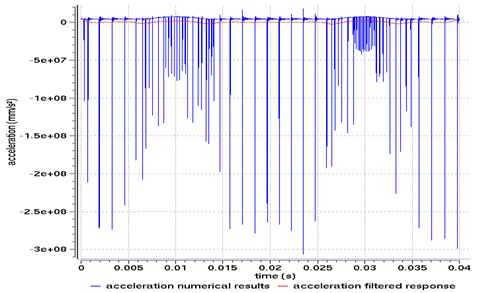
図 12. ペナルティ法を用いたTYPE7インターフェースでのメイン節点バルブの鉛直加速度
フィルターの品質はサンプルの数に依存し、このケースではRadiossでそれぞれのサイクルで計算された点の数になります。このため、良い結果を得るため、特に加速度曲線でのためにEngineファイル(*_0001.rad)内の/TFILEパラメーターには小さな値が使用されます。
以下のセクションでは、フィルターをかけた曲線のみが異なるモデルを比較するために示されます。
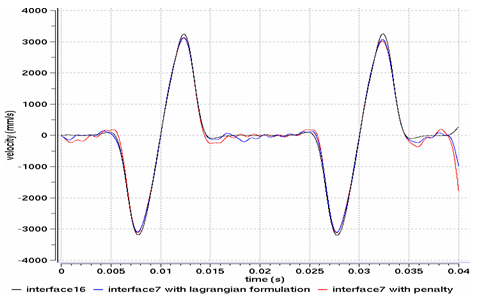
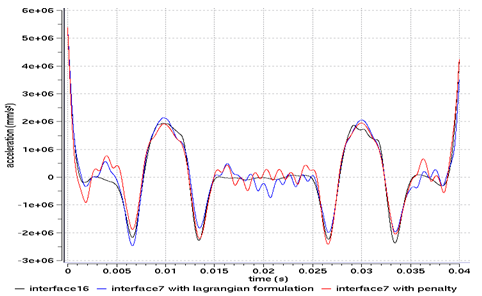
インターフェースの比較
図 13 と図 14はペナルティ法のTYPE7インターフェースを用いたモデルでの速度と加速度曲線を示します。メインパートとセカンダリパートの定義の場合は、結果が少し異なります。
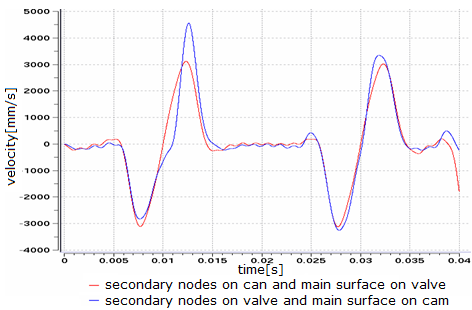
図 13. ペナルティ法を用いたTYPE7インターフェースでのバルブのメイン節点の鉛直速度
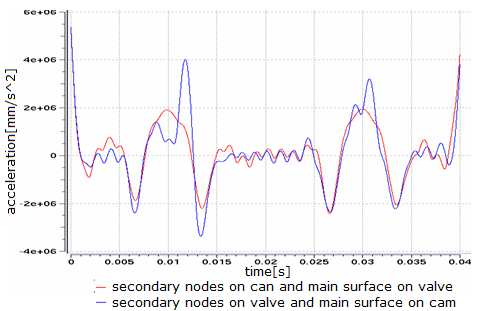
図 14. ペナルティ法を用いたTYPE7インターフェースでのバルブのメイン節点の鉛直加速度
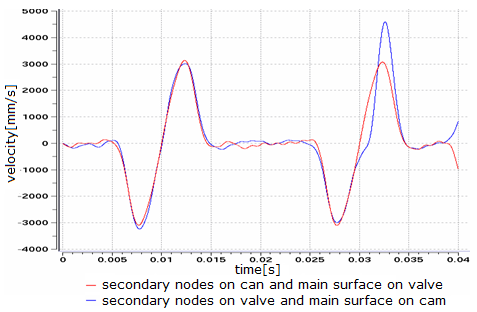
図 15. Lagrange乗数法を用いたTYPE7インターフェースでのバルブのメイン節点の鉛直速度
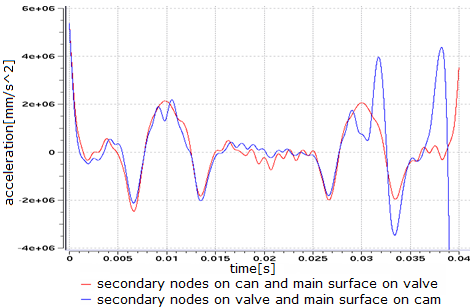
図 16. Lagrange乗数法を用いたTYPE7インターフェースでのバルブのメイン節点の鉛直加速度
ペナルティまたはLagrange乗数法のTYPE7インターフェースを用いた場合でも良い結果を達成することは可能ですが、2次メッシュでTYPE16インターフェースを用いて多面体による振動を減らすことができます。
メッシュの比較
- 細かいメッシュ:
- カム
- 200個のSHEL16要素(外側)と250個のBRIC20要素(内側)
- バルブ:
- 88個のSHEL16要素
- 粗いメッシュ:
- カム
- 40個のSHEL16要素
- バルブ:
- 12個のSHEL16要素
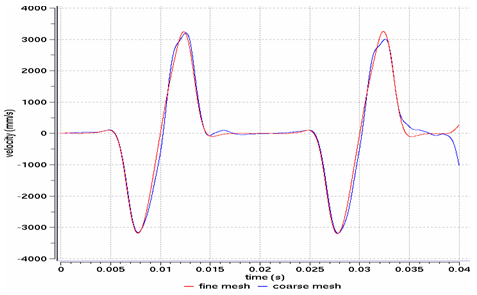
図 19. バルブのメイン節点の鉛直速度
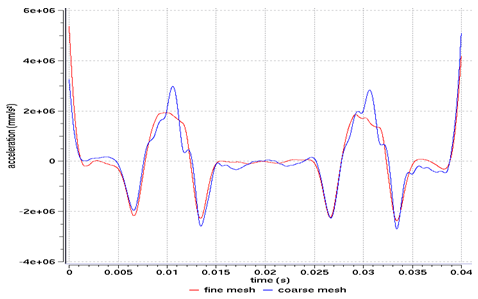
図 20. バルブのメイン節点の鉛直加速度
粗いメッシュでは曲面の多面体化を増幅するものの、フィルター後の速度の結果に影響を与えていません。しかしながら、細かいメッシュの加速度では、それぞれの節点 / サーフェス接触で限られた寄生振動を持ち、より良い結果を与えています。
摩擦
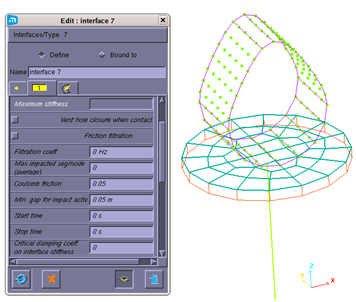
図 21. ペナルティと摩擦を用いたTYPE7インターフェース
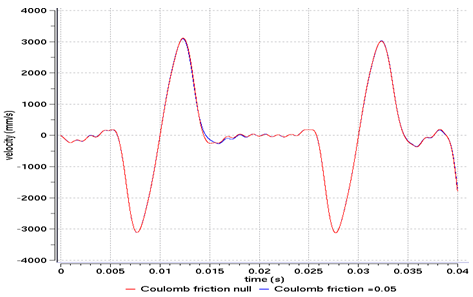
図 22. ペナルティ法を用いたTYPE7インターフェースでのバルブのメイン節点の鉛直速度
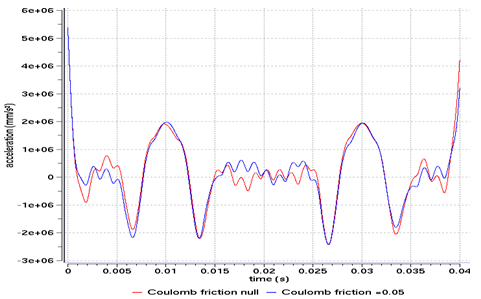
図 23. ペナルティ法を用いたTYPE7インターフェースでのバルブのメイン節点の鉛直加速度
| シミュレーション | CPU(正規化) | 時間ステップ |
|---|---|---|
| 細かいメッシュでのTYPE16インターフェース | 22.50 | 0.8365 x 10-7 |
| 粗いメッシュでのTYPE16インターフェース | 1 | 0.207 x 10-6 |
| ペナルティ法でのTYPE7インターフェース (カム上のセカンダリ節点とバルブ上のメインサーフェス) |
1.65 | 0.2133 x 10-6 |
| ペナルティ法でのTYPE7インターフェース (バルブ上のセカンダリ節点とカム上のメインサーフェス) |
1.75 | 0.2117 x 10-6 |
| TYPE7インターフェース: Lagrange乗数法 (カム上のセカンダリ節点とバルブ上のメインサーフェス) |
1.68 | 0.2133 x 10-6 |
| TYPE7インターフェース: Lagrange乗数法 (バルブ上のセカンダリ節点とカム上のメインサーフェス) |
1.69 | 0.2126 x 10-6 |
| ペナルティ法と摩擦を用いたTYPE7インターフェース (カム上のセカンダリ節点とバルブ上のメインサーフェス) |
1.66 | 0.2133 x 10-6 |
| ペナルティ法と摩擦を用いたTYPE7インターフェース (バルブ上のセカンダリ節点とカム上のメインサーフェス) |
1.65 | 0.2126 x 10-6 |
まとめ
この例題ではRadiossでのメカニズムのモデル化、特に接触のメカニズムの場合の能力について示しました。インターフェースTYPE16およびTYPE7が、平面と曲面の間の接触のモデル化に用いることができます。TYPE16インターフェースでは、2次曲面の間の接触をギャップを用いることなしでシミュレートすることが可能で、正確な結果を妥当な計算時間内に得ることができます。TYPE7インターフェースは接触の摩擦をモデル化することが可能で、少ない計算時間で良い結果を得ることができます。