RD-E:1200 ジャンプする自転車
重力を用いた準-静的プレロードの後、ダミーのサイクリストが平面に沿って走行し、次に下の平面に飛び降ります。センサーが時間に関するシナリオのシミュレートに用いられます。

図 1.
使用されるオプションとキーワード
- シェル、ソリッド、ビーム、トラス、一般スプリング、ビーム
- 剛体上のセンサー(/SENSOR/RBODYおよび/RBODY)、モニター体積(完全気体)(/MONVOL/GAS)
- 準-静的荷重の取り扱い(重力)(/GRAV)、動的緩和(/KEREL)、リスタートファイル
- ダミー、階層構造
- TYPE7インターフェースauto接触(/INTER/TYPE7)、剛壁(無限平面と平行四辺形)(/RWALL)
- 線形弾性則(/MAT/LAW1 (ELAST))、Johnson-Cook則(/MAT/LAW2 (PLAS_JOHNS))
- 付加質量(/ADMAS)
- 初速度(/INIVEL)
- 固定無限平面(フロア)
- 固定平行四辺形(スプリングボード)
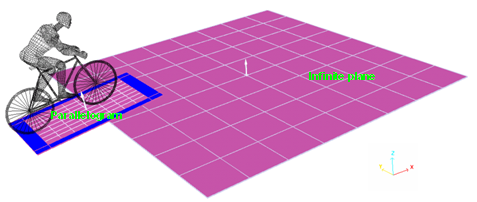
図 2. 剛壁の位置
平行四辺形平面の特性は: 2013 mm x 1200 mm。両方の剛壁はホイルが回転するようにタイド(滑り無し条件)にされます。

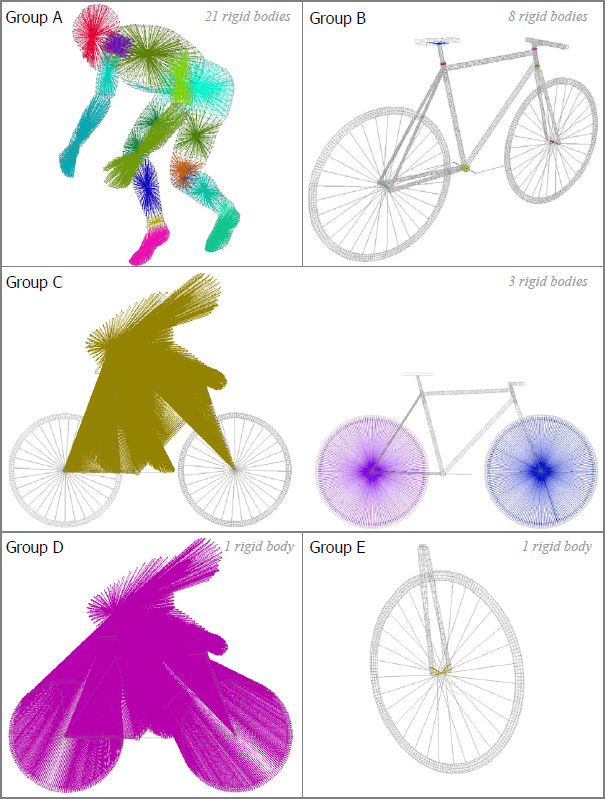
図 4. 剛体のクラス分け(グループ)
剛体の慣性はグループA、C、およびDでは局所スキューにセットされます。
- 剛体アクティブ化 / 非アクティブ化
- グループAおよびグループB
- 剛体はつり合いまでのプレローディングの間アクティブになり、その後、スタートの初速度が作用されます。これらは、バイクが下の平面に衝突する直前に再びアクティブ化されます。
- グループC
- ダミー、フレームと両方のホイール(タイヤは含まれません)を含む、3つの剛体。この形態で、アクティブなタイヤの平面への作用を考慮して、ホイールのみを回転できます。剛体はバイクがスプリングボード上を走行している間アクティブになります。
- グループD
- これは全体の剛体で、モデルの全ての節点を含み、バイクが自由飛行をしている間アクティブ化され、フロアへの衝突の直前に非アクティブ化されます。
- グループE
- この剛体は衝突の前にアクティブ化されて、下のフォークのレベルの剛性を保証します。
8333 mms-1(30 km/h)の初速度(/INIVEL)がモデルの全ての節点(自転車とサイクリスト)に高い平面と平行に時刻t = 0.004 sに作用されます。この初期条件はEngineファイル *_0002.rad(開始時間: 0.004 s)で、重力荷重による準-静的つり合いの後に実行されます。
- /INIV/TRA/X/1
- 方向xの初期並進速度
- 8333
- 8333 mm/s
- 1 338000
- 節点1から338000上
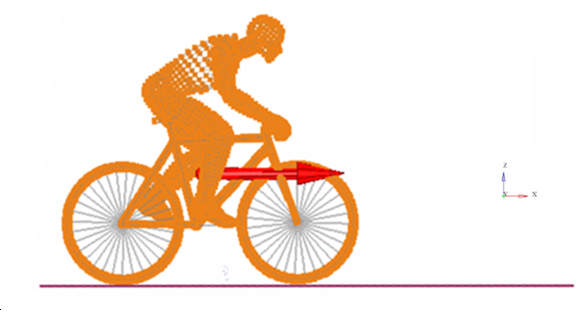
図 5. バイク-人モデルの t = 0.004 sでの初期並進速度(30 km / h)
図 6. 重力関数 (-9810 mm/s-2)
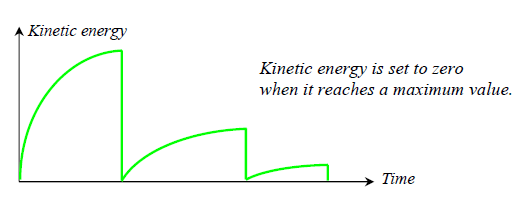
図 7. 運動学的緩和法:
- TIME
- 時間でアクティブ化
- DIST
- 節点距離でアクティブ化
- INTER
- 剛壁への衝突後にアクティブ化
- SENSOR
- センサーISでアクティブ化とセンサーIS2で非アクティブ化
- NOT
- センサーIS1がOFFの間ON

図 8. センサーのアクティブ化と非アクティブ化のイベント定義
シミュレーションの開始時(time=0)、剛体はセンサーが非アクティブな限り、自動的にONに設定されます。このため最初のサイクルで剛体を非アクティブ化するためには、時刻t=0でアクティブのセンサーを用いる必要があります。同様に、センサーが非アクティブな時、剛体はアクティブになります。
| 名称 | タイプ | 定義 | センサーを用いる剛体のグループ |
|---|---|---|---|
| S1 | TIME | 時刻 0s | - |
| S2 | DIST | 近いハブとスプリングボード先端の距離が1810 mmに等しい | - |
| S3 | DIST | 近いハブとスプリングボード先端の距離が345 mmに等しい | - |
| S4 | RWALL | 剛壁が衝突された時 | - |
| SEN(S2,S3) | SEN | S2でアクティブ化、S3で非アクティブ化 | - |
| SEN(S3,S4) | SEN | S3でアクティブ化、S4で非アクティブ化 | - |
| SEN(S2,S4) | SEN | S2でアクティブ化、S4で非アクティブ化 | グループ A / B |
| NOT(SEN(S2,S3)) | NOT | S2でアクティブ化、S3で非アクティブ化 | グループ C |
| NOT(SEN(S3,S4)) | NOT | S3でアクティブ化、S4で非アクティブ化 | グループ D |
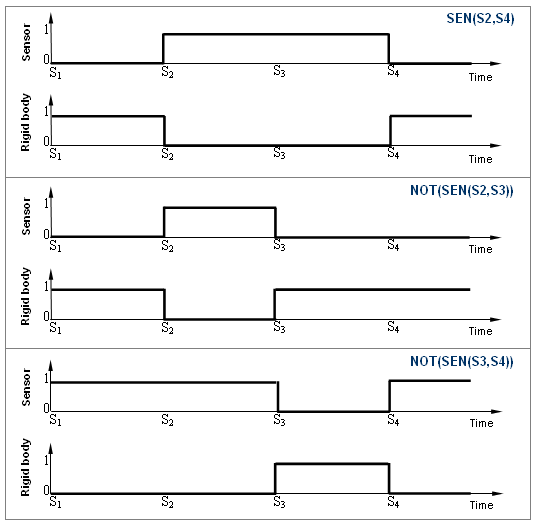
図 9. センサーと剛体のアクティブ化と非アクティブ化
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
モデル概要
この例題の目的は、時間と共に問題を変えることができるリスタートファイルとセンサーを用いたデモのセットアップをすることにあります。
- 重力効果によるサイクリストのポジショニング
- 高い平面上の自転車の走行
- 自由飛行
- 地面への接触
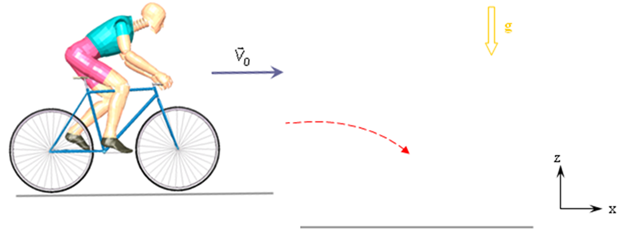
図 10.
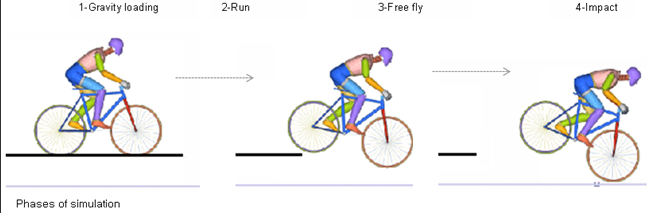
図 11.
モデリング手法
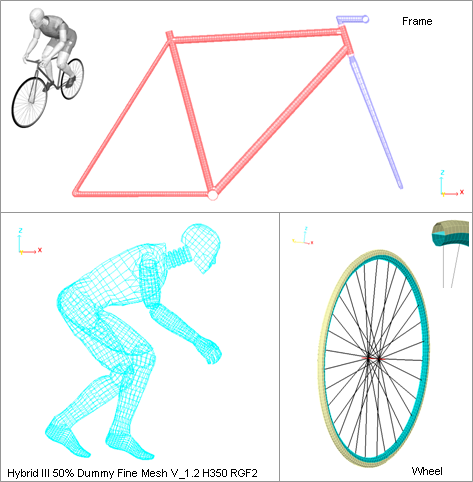
図 12. モデルの主要パートのメッシュ
- スチール製スポークの材料特性
- ヤング率
- 210000
- ポアソン比
- 0.3
- 密度
- 7.9x10-9
- 降伏応力
- 185.4
- 硬化パラメータ
- 540
- 硬化指数
- 0.32
- アルミ製枠の材料特性
- ヤング率
- 60400
- ポアソン比
- 0.33
- 密度
- 2.7x10-9
- 降伏応力
- 90.27
- 硬化パラメータ
- 223.14
- 硬化指数
- 0.375
| パート | プロパティ | 材料 | |
|---|---|---|---|
| バイク | フレーム | シェル Q4 – 3 mm | アルミ – 材料則 2 |
| スポーク | トラス – 2 mm2 | スチール – 材料則 2 | |
| リム | シェル Q4 – 3 mm | アルミ – 材料則 2 | |
| タイヤ | シェル QEPH – 3 mm | ゴム – 材料則 1 | |
| ハブ | ビーム – 900 mm2 | スチール – 材料則 2 | |
| サドル | ソリッド | フォーム – 材料則 1 | |
| ペダル | ビーム – 900 mm2 | スチール – 材料則 2 | |
| サドルのチューブ | シェル Q4 – 3 mm | アルミ – 材料則 2 | |
| ダミー | ボディ(胴) | シェル Q4 – 3 mm | 材料則1 |
| ジョイント | スプリング (8) | - |
- 自転車モデル
- 23パートから成る6個のサブセット
- ダミーモデル
- 38パートから成る11個のサブセット
モニター体積 / 完全気体
完全気体モニター体積(/MONVOL/GAS)がタイヤの圧力のモデル化のため定義されます。モニター体積に関して詳細は、Radioss Theory ManualのGAS Typeをご参照ください。
- 外圧 Pext
- 0.1
- 初期内部気圧 Pini
- 前輪: 0.75
- 気体定数
- 1.4
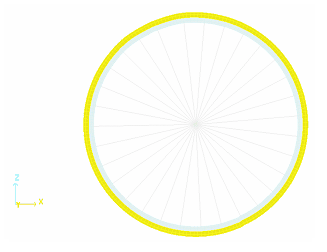
図 13. モニター体積のモデル化 (黄色のパート)
- 準-静的荷重: 初期釣り合いへの重力の効果
構造のへの重力荷重の準-静的解は過渡応答の定常解部分に一致します。これが動的解析前のプレロードの場合を記述します。したがって、シミュレーションは、準-静的応答(重力が作用する構造)と動的挙動(走行、ジャンプ、着地)という2つのフェーズに分割されます。解は運動学的緩和から得られます(/KEREL参照)。重力は/GRAVでアクティブになります。
- 接触のモデル化ペナルティ法を用いたTYPE7インターフェースがダミーとバイクの間の接触のモデル化に用いられます。バイクの着地の扱いには/RWALLでの接触。図 14 はインターフェースの概要を示します。
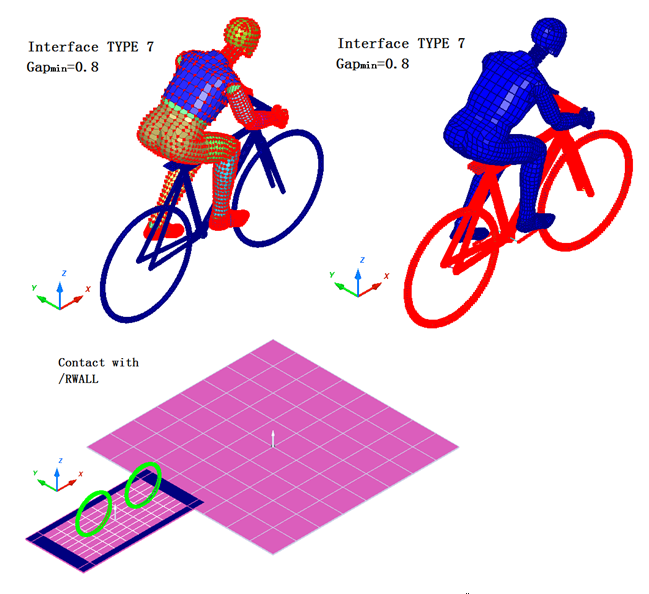
図 14. TYPE7インターフェースおよび/RWALLでの接触のモデル化(ペナルティ法)
- サイクリストと自転車の間の結合
- 剛性(TX、TY と TZ)
- 50
- 質量
- 1e-10
- 慣性
- 1e-5
- 左手: Z = 20 mm
- 右手: Z = 20 mm
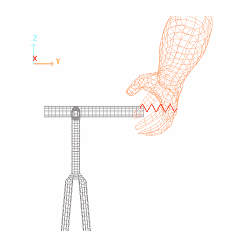
図 15. 右手 / ハンドルバーの結合(TYPE8スプリング) - ダミージョイント
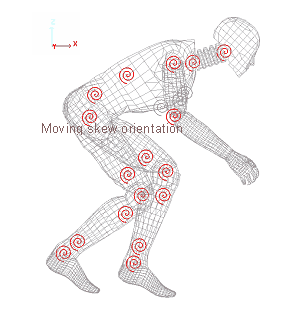
図 16. TYPE8スプリング
一般TYPE8スプリングによって、各自由度について付与された剛性を持つ球状ヒンジが特性化されます。方向は局所的であり、移動するスキューフレームに結合されます。2つの一致する節点がスプリングを定義します。
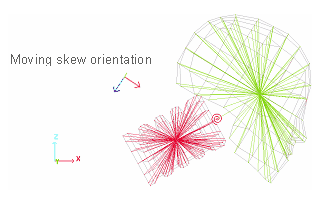
図 17. 剛体結合 - スプリングTYPE8 - 剛体
- ホイールの回転
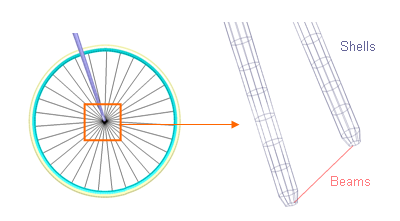
図 18. ホイール / フォーク 結合点
結果
剛体に含まれる要素は非アクティブ化されます。そのため、/TH/RBODY にセーブされた要素フラグがシミュレーションの間の剛体のアクティブ化と非アクティブ化の情報を提供します。
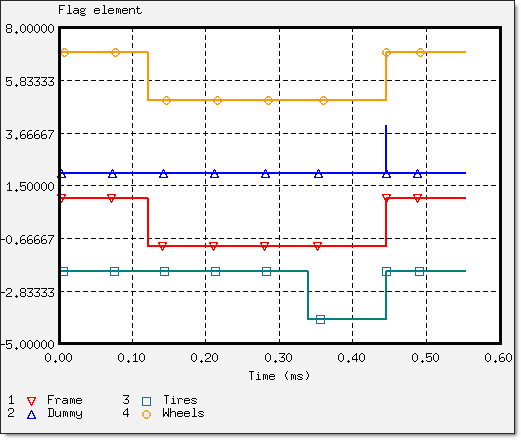
図 19. 主なモデルのパートのアクティブ化と非アクティブ化(要素フラグのON/OFF)
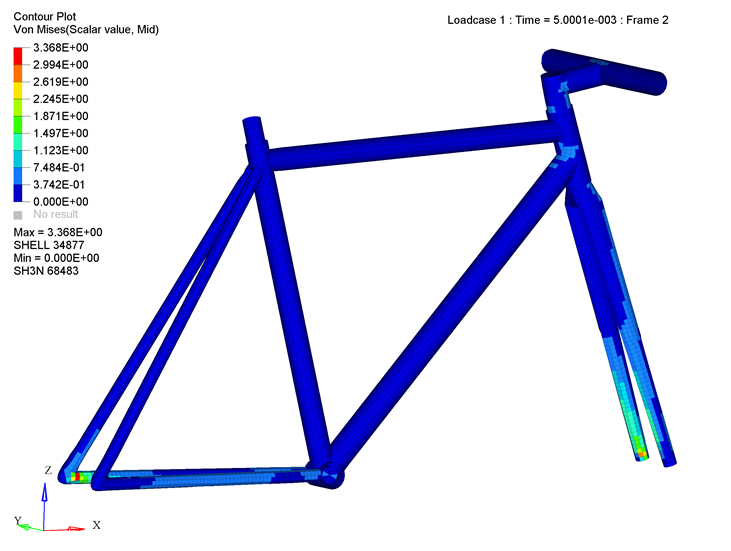
図 20. 準-静的解析の後のvon Mises応力分布
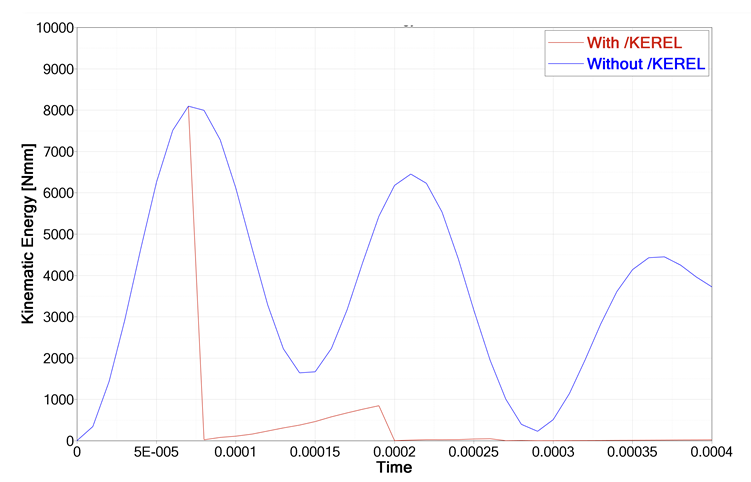
図 21. /KERELでの運動エネルギーの運動学的緩和の効果
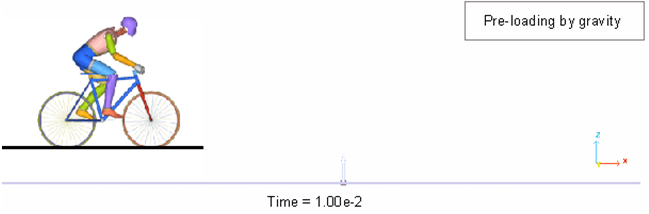
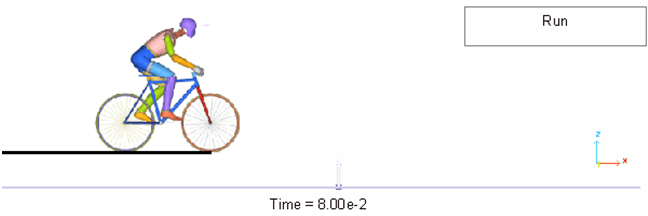
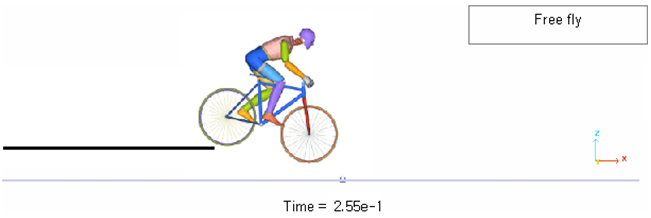
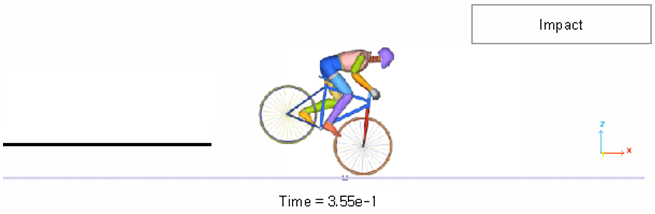
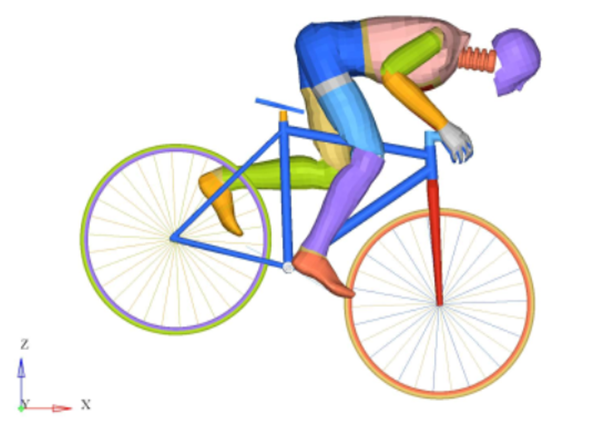
図 23. 地面に接触の間のダミーサイクリストの形状(靴は付いておらず)
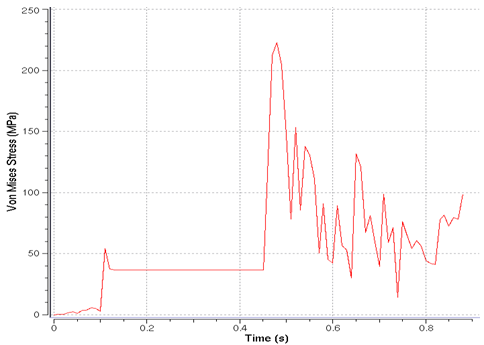
図 24. フレームのシェル要素のvon Mises応力変化