/INTER/TYPE7
ブロックフォーマットのキーワード インターフェースTYPE7は、メインサーフェスとセカンダリ節点グループ間の接触をモデル化する多用途衝撃インターフェースです。熱伝導および熱摩擦を考慮することもできます。
内容
- 1つの節点を同時にセカンダリ節点とメイン節点にすることができます。
- 各セカンダリ節点は、現在のセグメントに結合しているメインセグメントを除き、各メインセグメントに衝撃を与えることができます。
- 1つの節点が複数のセグメントに衝撃を与えることができます。
- また、1つの節点が、各セグメントの2つの側面、エッジ、およびコーナーに衝撃を与えることができます。
- 制約なしの高速検索アルゴリズムです。
- 高衝撃速度または小規模ギャップを伴う接触の場合は、時間ステップが短縮されます。
- 高衝撃速度での剛体または小規模ギャップを伴う剛体で使用すると、正しく機能しません。
- エッジ間接触は解決されません(これを解決するには、/INTER/TYPE11をTYPE7と一緒に使用する必要があります)。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE7/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| grnd_IDs | surf_IDm | Istf | Ithe | Igap | Ibag | Idel | Icurv | Iadm | |
| Fscalegap | Gapmax | Fpenmax | ITIED | ||||||
| Stmin | Stmax | %mesh_size | dtmin | Irem_gap | Irem_i2 | ||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| node_ID1 | node_ID2 |
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Stfac | Fric | Gapmin | Tstart | Tstop | |||||
| IBC | Inacti | VISs | VISF | Bumult | |||||
| Ifric | Ifiltr | Xfreq | Iform | sens_ID | fct_IDF | AscaleF | fric_ID | ||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | |||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C6 | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| NRadm | Padm | Angladm | |||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kthe | fct_IDK | Tint | Ithe_form | AscaleK | |||||
| Frad | Drad | Fheats | Fheatm | ||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| inter_ID | インターフェースの識別子 (整数、最大10桁) |
|
| unit_ID | unit_ID。 (整数、最大10桁) |
|
| inter_title | インターフェースのタイトル (文字、最大100文字) |
|
| grnd_IDs | セカンダリ節点グループ識別子 (整数) |
|
| surf_IDm | メインサーフェスの識別子 (整数) |
|
| Istf | インターフェース剛性定義フラグ 3 SPHでは、Istf=0、1および1000のみ可能。
(整数) |
|
| Ithe | 熱接触フラグ。
(整数) |
|
| Igap | ギャップ/要素オプションフラグ 11
(整数) |
|
| Ibag | 接触時のエアバッグベントホール閉鎖フラグ このフラグは、対応するソリッド要素が接触している場合にSol2SPH粒子をアクティブにするためにも使用されます。
(整数) |
|
| Idel | 節点およびセグメントの削除フラグ。
(整数) 注: Idel=1および-1は、Idel=2および-2と比較してCPUコストが高くなります。
|
|
| Icurv | 曲率を伴うギャップエンベロープ 5
(整数) |
|
| Iadm | アダプティブメッシュでの局所曲率計算フラグ。 6 7 8
(整数) |
|
| Fscalegap | ギャップスケールファクター(Igap = 2および3の場合にのみ使用) デフォルト = 1.0(実数) |
|
| Gapmax | 最大ギャップ(Igap = 2および3の場合にのみ使用) (実数) |
|
| Fpenmax | 初期貫通の最大比率。 13 (実数) |
|
| ITIED | Tie接触節点フラグ。
(整数) |
|
| Stmin | 最小剛性(Istf = 2、3、4または5の場合にのみ使用されます) (実数) |
|
| Stmax | 最大剛性(Istf = 2、3、4または5の場合にのみ使用されます) デフォルト = 1030(実数) |
|
| %mesh_size | メッシュサイズのパーセンテージ(Igap = 3の場合にのみ使用) デフォルト = 0.4(実数) |
|
| dtmin | 最小インターフェース時間ステップ 23 (実数) |
|
| Irem_gap | 自己接触において要素サイズがギャップ値より小さい場合にセカンダリ節点を非アクティブ化するためのフラグ。 14
(整数) |
|
| Irem_i2 | インターフェースTYPE2で同じ接触ペア(節点)が定義されている場合に、セカンダリ節点を非アクティブにするためのフラグ。
|
|
| node_ID1 | 第1節点識別子 (整数) |
|
| node_ID2 | 第2節点識別子(Icurv = 1の場合は無視されます) (整数) |
|
| Stfac | インターフェースのメイン側に適用される剛性スケールファクター(Istf
1の場合) デフォルト = 1.0(実数) |
|
| インターフェース剛性(Istf = 1の場合) デフォルト = 1.0(実数) |
||
| Fric | Coulomb摩擦(fct_IDF = 0の場合) デフォルト = 0.0(実数) |
|
| クーロン摩擦のスケールファクター(fct_IDF
0の場合) 20 デフォルト = 1.0(実数) |
||
| Gapmin | 衝撃アクティブ化の最小ギャップ デフォルト値については、10を参照のこと(実数) |
|
| Tstart | 開始時間。 (実数) |
|
| Tstop | 一時的な非アクティブ化の時間。 (実数) |
|
| IBC | 接触時の境界条件の非アクティブ化フラグ (ブーリアン) |
|
| Inacti | 初期貫通時の剛性の非アクティブ化フラグ 13
(整数) |
|
| VISs | インターフェース剛性の臨界減衰係数 デフォルトは0.05に設定されます(実数) |
|
| VISF | 接触インターフェース摩擦の臨界減衰係数。 22 デフォルトは1.0に設定されます(実数) |
|
| Bumult | ソート係数はソートアルゴリズムの高速化に使用されます。また、マシンによって異なります。 デフォルトは0.20に設定されます(実数) |
|
| Ifric | 摩擦定式化フラグ。 1617 fric_IDが定義されていない場合のみ使用されます。
(整数) |
|
| Ifiltr | 摩擦フィルタリングフラグ。 18
(整数) |
|
| Xfreq | フィルタリング係数。 デフォルト値はIfiltrに依存します(実数) |
|
| Iform | 摩擦ペナルティ定式化のタイプ。 19
(整数) |
|
| sens_ID | インターフェースをアクティブ化 / 非アクティブ化するためのセンサーの識別子 24 識別子センサーが定義されている場合は、インターフェースのアクティブ化 / 非アクティブ化はセンサーに基づき、TstartまたはTstopには基づきません。 (整数) |
|
| fct_IDF | 温度による摩擦係数の関数識別子 デフォルト = 0(整数) |
|
| AscaleF | fct_IDFの横軸のスケールファクター デフォルト = 1.0(実数) |
|
| fric_ID | 選択されたパートのペアについての摩擦定義の摩擦識別子
(整数) |
|
| C1 - C6 | 摩擦則係数。 (実数) |
参照: 表 1 |
| Kthe | 熱交換係数(fct_IDK = 0の場合) デフォルト = 0.0 |
|
| 熱交換係数(fct_IDK
0の場合) 20 デフォルト = 1.0(実数) |
||
| fct_IDK | 接触圧力に対する熱交換定義の関数識別子 デフォルト = 0(整数) |
|
| AscaleK | fct_IDKの横軸のスケールファクター デフォルト = 1.0(実数) |
|
| Tint | インターフェース温度 20 (実数) |
|
| Ithe_form | 熱接触定式化フラグ
(整数) |
|
| NRadm | 90度の半径を経由する要素の数 (整数) |
|
| Padm | 貫通の割合に関する基準 デフォルト = 1.0(実数) |
|
| Angladm | 角度基準 (実数) |
|
| Frad | 放射係数 (実数) |
|
| Drad | 放射計算の最大距離 (実数) |
|
| Fheats | セカンダリの摩擦加熱ファクター 21 (実数) |
|
| Fheatm | セカンダリの摩擦加熱ファクター 21 (実数) |
境界条件の非アクティブ化フラグ:IBC
| (1)-1 | (1)-2 | (1)-3 | (1)-4 | (1)-5 | (1)-6 | (1)-7 | (1)-8 |
|---|---|---|---|---|---|---|---|
| IBCX | IBCY | IBCZ |
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| IBCX |
(ブーリアン) |
|
| IBCY |
(ブーリアン) |
|
| IBCZ |
(ブーリアン) |
コメント
- SPMDの場合、surf_IDmによって定義される各メインセグメントを1つの要素に関連付ける必要があります(ボイド要素の場合もあります)。
- フラグIbagについては、モニター体積オプション(モニター体積(エアバッグ))をご参照ください。
- 接触剛性Kは以下のように計算されます:Istf =1の場合:
(1) Istf = 2、3、4または5の場合:(2) Istf =1000の場合:(3) ここで、 は、メインセグメントの剛性 とセカンダリ節点の剛性 の両方から計算されます:
Istf = 2、
Istf = 3、
Istf = 4、
Istf = 5、
はメインセグメントの剛性で、次のように計算されます:
メインセグメントがシェル上に存在するか、シェルとソリッドによって共有されている場合:(4) メインセグメントがソリッド上に存在する場合:(5) ここで、- セグメント面積
- ソリッドの体積
- 体積弾性率
はインターフェースTYPE7として考慮される相当節点剛性で、次のように計算されます:
節点がシェル要素に結合されている場合:(6) 節点がソリッド要素に結合されている場合:(7) 剛性スケールファクターの値に対する制限はありません(ただし、値が1.0より大きいと、初期時間ステップが短くなる場合があります)。
/PROP/VOIDと/MAT/VOIDを使用する際、ボイド材料の材料プロパティと板厚が入力されなければなりません。そうしないと、ボイド要素の接触合成はゼロになります。シェル要素の剛性が接触計算に使用されるため、これは、ボイドシェル要素がソリッド要素と要素を共有する場合に特に重要です。
- Istf = 2、3、4または5は、SPH定式化と適合性がありません。
- Icurv = 1の場合は、node_ID1(球の中心)を使用してギャップの球形曲率が定義されます。
Icurv = 2の場合は(円筒形の軸上にある)node_ID1とnode_ID2を使用してギャップの円筒曲率が定義されます。
Icurv = 3の場合は、メインサーフェスの形状が、座標の連続性とセグメント間の法線に配慮した双三次補間を使用して取得されます。曲率の変化が速くて大きい場合は、この定式化が不安定になる可能性があります(将来のバージョンで改善される予定です)。
図 1. - アダプティブメッシングとIadm = 1の場合: 曲率半径が要素サイズ(セカンダリ側)未満のゾーン(メイン側)で接触が発生した場合は、セカンダリ側の要素が分割されます(最大レベルに到達していない場合)。

図 2. - アダプティブメッシングとIadm = 2の場合:
曲率半径が要素サイズのNRadm倍(セカンダリ側)未満のゾーン(メイン側)で接触が発生した場合は、セカンダリ側の要素が分割されます(最大レベルに到達していない場合)。
法線間の角度がAngladmを超えており、貫通の割合がPadmを超えているゾーン(メイン側)で接触が発生した場合は、セカンダリ側の要素が分割されます(最大レベルに到達していない場合)。
図 3. - 係数NRadm、PadmおよびAngladmは、アダプティブメッシングとIadm=2の場合にのみ使用されます。
- Gapmax=0の場合、ギャップの最大値が存在しません。
- Gapmin=0または空白の場合、デフォルト値は以下のように計算されます:
メインセグメントがシェルおよびソリッド要素である場合、Gapmin = min ( , )。
ここで、- メインシェル要素の平均板厚(Igap=0の場合)
- メインシェル要素の最小板厚(Igap=1、2または3の場合)
- すべてのメインセグメント(シェルまたは3次元ソリッド)の中の最小辺長
メインセグメントがすべてソリッド要素である場合、Gapmin =
ここで、 は、すべてのメイン3次元ソリッドセグメントの中で最小の辺です。
- 可変ギャップIgap = 1の場合、可変ギャップは次のように計算されます:
(8) Igap = 2の場合、可変ギャップは次のように計算されます:(9) Igap = 3の場合、可変ギャップは自己接触に対して次のように計算されます:(10) ここで、-
: メイン要素のギャップ
: ここで は、シェル要素に対するメイン要素の板厚
: 3次元ソリッド要素の場合
-
: セカンダリ節点のギャップ
: セカンダリ節点がどの要素にも結合されていないか、3次元ソリッド要素またはスプリング要素にのみ結合されている場合
: ここで は、セカンダリ節点に結合されているシェル要素の最大板厚です。
: トラスおよびビーム要素の場合。ここで、 はトラスおよびビーム要素の断面
- : 要素の短いエッジの長さ
- : セカンダリ要素に結合された要素の短いエッジ長さ
セカンダリ節点が複数のシェルおよび/またはビームまたはトラスに結合されている場合は、計算された中で最も大きいセカンダリギャップが使用されます。
可変ギャップは常にGapmin以上です。
-
: メイン要素のギャップ
- 境界条件の非アクティブ化は、セカンダリ節点グループ(grnd_IDs)に適用されます。
- 節点がスプリング要素に属している場合にInacti = 3であると、初期エネルギーが発生することがあります。インターフェースに対する高周波数の影響を回避するためには、Inacti =5ではなく、Inacti = 6が推奨されます。

図 4.Fpenmaxが0でない場合、次の条件が満たされると、節点剛性は非アクティブになります:
これはInactiの値に左右されません。
- Irem_gap = 2を使用すると、要素サイズをギャップ値よりも小さくできます:
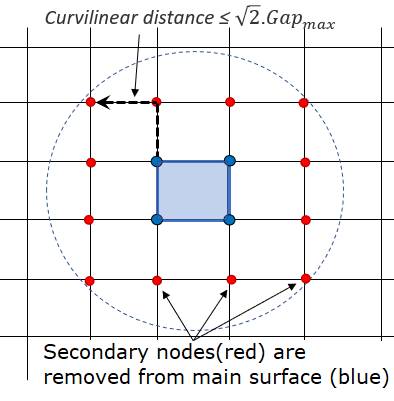
図 5. 節点対サーフェス接触から消去されたセカンダリ節点自己接触では、Curvilinear Distance(メインセグメントの節点からセカンダリ節点まで)が よりも小さい場合(初期構成において)、このスセカンダリ節点はこのメインセグメントで考慮されず、他のメインセグメントの接触からは削除されません。
- 1つの節点が2つのサーフェスに同時に属することができます。
- fric_IDが定義されている場合、接触摩擦は/FRICTIONで定義され、この入力カード内の摩擦入力(Ifric、C1など)使用されません。
摩擦定式化の場合:
摩擦フラグIfric=0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:
ここで、 (は、クーロン摩擦係数)- fct_IDF = 0の場合:IfricはCoulomb摩擦。
(11) - fct_IDF ≠ 0の場合:Fricは、温度に依存するクーロン摩擦係数のスケールファクターになります。
(12)
ここで、 は、セカンダリとメインの平均温度として取得される温度:(13) フラグIfric > 0の場合、新しい摩擦モデルが導入されます。この場合、摩擦係数は関数によって設定されます。
ここで、- メインセグメントの垂直抗力の圧力
- メインセグメントに相対するセカンダリ節点の接線速度
- fct_IDF = 0の場合:
- 現在は、係数C1~C6を使用して、新しい摩擦定式化の可変摩擦係数
を定義しています。以下の定式化を使用できます:
- Ifric = 1(汎用の粘性摩擦則):
(14) - Ifric = 2(修正Darmstad則):
(15) - Ifric = 3(Renard則):
(16) (17) (18)
ここで、Ifric=3の場合:- 、静摩擦係数、右記である必要があります;
- 、動摩擦係数、右記である必要があります;
- 、最大摩擦係数
- 、最小摩擦係数
- 、第1臨界速度、> 0である必要があります
- 、第2臨界速度、右記である必要があります;
表 1. 摩擦定式化の単位 Ifric Fric C1 C2 C3 C4 C5 C6 1 2 3 - Ifric = 1(汎用の粘性摩擦則):
- 摩擦フィルタリング:Ifiltrフラグ 0の場合は、接線力がフィルタを使用して以下のようにスムージングされます:
(19) ここで、- フィルタリングされた接線力。
- フィルター前の時間tにおける計算された接線力。
- 前の時間ステップでフィルタリングされた接線力
- 現在のシミュレーション時間
- 現在のシミュレーション時間ステップ
- フィルタリング係数
ここで、α係数は、以下のように計算されます:- Ifiltr = 1の場合: 、単純な数値フィルターで、値の範囲は0~1です。
- Ifiltr = 2の場合: 、標準の-3dBフィルターで、フィルター処理する時間ステップ数は として定義されます。 はフィルター処理周期です。
- Ifiltr = 3の場合: 標準の-3dBフィルターで、Xfreq = カット周波数。
- 摩擦ペナルティ定式化Iform:
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです:
(20) このとき、粘着力は以下のように計算されます:(21) - Iform = 2の粘性定式化の場合、摩擦力は次のとおりです:
(22) このとき、粘着は以下のように計算されます:
ここで、
は、メインセグメントに相対するセカンダリ節点の接線速度
陰解析と陽解析には、Iform = 2が推奨されています。
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです:
- 熱交換:Ithe=1(熱伝導をアクティブ化)にすることで、接触の熱交換と熱摩擦を考慮します。
- Ithe_form = 0の場合、熱交換はシェルと一定温度接触Tintの間で行われます。
- Ithe_form = 1の場合、熱交換はすべての接触片間で行われます。
TintはIthe_form=0の場合にのみ使用されます。この場合、メイン側の温度は一定(Tintに等しい)と想定されます。Ithe_form=1の場合、Tintは考慮されません。このため、メイン側の節点温度が考慮されます。
熱交換係数:- fct_IDK = 0の場合、Ktheは熱交換係数で、熱交換は熱交換サーフェスのみに依存します。
- fct_IDK ≠ 0の場合、Ktheはスケールファクターで、熱交換は接触圧力に依存します:
(23) - ここで、 はfct_IDKの関数です。
- 熱摩擦:
- インターフェースでIthe > 0である場合、摩擦エネルギーは熱に変換されます。
- FheatsとFheatmは摩擦エネルギーの比率で、エネルギーがこの比率でそれぞれセカンダリ側とメイン側に分配されます。したがって一般的に:
(24) FheatsとFheatmがいずれも0であると、摩擦スライディングエネルギーから熱への変換はアクティブになりません。
- 摩擦熱QFricは、以下のように定義されます:
- Iform= 2の場合(剛性定式化):セカンダリ側:
(25) メイン側:(26) (Ithe_form=1) - Iform= 1の場合(ペナルティ定式化):セカンダリ側:
(27) メイン側:(28) (Ithe_form=1)
- Iform= 2の場合(剛性定式化):
- 放射:放射が接触で考慮されるのは、 で、セカンダリ節点のメインセグメントまでの距離、 が次の場合です:
(29) ここで、 は放射計算の最大距離です。 のデフォルト値は、以下の最大値として計算されます:- 全節点中のGapの上限値(時間0における)
- セカンダリ要素の最小辺長
の値は、Radioss Engineのパフォーマンスの減少を引き起こすかもしれないため、高すぎる値に設定しないことを推奨します。
熱伝導の放射は以下のように計算されます:(30) ここで、(31) ここで、- シュテファンボルツマン定数
- セカンダリサーフェスの輻射率
- メインサーフェスの輻射率
- この接触内のセカンダリ節点の時間ステップがdtminより小さくなると、セカンダリ節点は接触から消去され、警告のメッセージが出力ファイルに書き出されます。このdtmin値は、/DT/INTER/DEL内に入力されるあらゆるモデルインターフェースの最小タイムステップより優先されます。
- インターフェースのアクティブ化 / 非アクティブ化のためにsens_IDが定義されている場合、TstartおよびTstopは考慮されません。
- SOL2SPH定式化(/PROP/TYPE14(SOLID))を使用するパートでは、オプションIdel= -1または-2をアクティブにする必要があります。