/INTER/TYPE21
ブロックフォーマットのキーワード スタンピング用に設計された剛体のメインサーフェスとセカンダリサーフェス間に固有のインターフェース。メインサーフェスの全ての節点は剛体に属する必要があります。
内容
- 1つの節点を同時にセカンダリ節点とメイン節点にすることはできません。
- メインセグメントの法線は、セカンダリサーフェスの方向に向かっている必要があります。
- 衝撃が1つのセグメントから隣接のセグメントにスライドするときに、垂直抗力および接線力の継続性が保証されるように、セカンダリ節点ごとの単一の衝撃は保持されます。
- ギャップは、セカンダリ側のシェルおよび3節点シェルの板厚の変化に応じて、変化する可能性があります。
- 高速検索アルゴリズム。
- SPMDバージョンによる高速化。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE21/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| surf_IDs | surf_IDm | Istf | Ithe | Igap | Idel | Invn | Iadm | ||
| Fscalegap | Gapmax | DEPTH | Pmax | ITlim | |||||
| Stmin | Stmax | Pskid | |||||||
| Stfac | Fric | Gapmin | Tstart | Tstop | |||||
| IBC | Inacti | VISs | Bumult | ||||||
| Ifric | Ifiltr | Xfreq | sens_ID | fct_IDF | AscaleF | ||||
| C1 | C2 | C3 | C4 | C5 | |||||
| C6 | |||||||||
| NRadm | Padm | Angladm | |||||||
| Kthe | fct_IDK | AscaleK | Tint | Ithe_form | |||||
| Frad | Drad | Fheat | fct_IDc | Dcond | |||||
| IDrby | IDref | Damp | Dampr | ||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| inter_ID | インターフェースの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子。 (整数、最大10桁) |
|
| inter_title | インターフェースのタイトル (文字、最大100文字) |
|
| surf_IDs | セカンダリサーフェスの識別子 (整数) |
|
| surf_IDm | メインサーフェスの識別子 (整数) |
|
| Istf | 剛性定義フラグ
(整数) |
|
| Ithe | 熱伝導フラグ
(整数) |
|
| Igap | ギャップ/要素オプションフラグ 2
(整数) |
|
| Idel | セカンダリ節点削除フラグ。
(整数) |
|
| Invn | 反転されたメイン法線のテストフラグ 21
(整数) |
|
| Iadm | アダプティブメッシュでの局所曲率計算フラグ。 3 (整数) |
|
| Fscalegap | ギャップスケールファクター デフォルト = 1.0(実数) |
|
| Gapmax | 最大ギャップ (実数) |
|
| DEPTH | ドロービードの深さ 4 (実数) |
|
| Pmax | 板厚増による最大接触圧力 5 デフォルト = 1030(実数) |
|
| ITlim | 接線力の制限のアクティブ化 5
(整数) |
|
| Stmin | 最小剛性 (実数) |
|
| Stmax | 最大剛性 デフォルト = 1030(実数) |
|
| Pskid | スキッドライン出力(/H3D/NODA/SKID_LINE)について接線力を定義するために使用される最大接触圧力 デフォルト = 1030(実数) |
|
| Stfac | インターフェース剛性(Istf = 1の場合) デフォルトは0.0に設定されます(実数) |
|
| インターフェースの剛性スケールファクター(Istf = 0の場合) デフォルトは1.0に設定されます(実数) |
||
| Fric | Coulomb摩擦(fct_IDF = 0の場合) デフォルト = 0.0(実数) |
|
| クーロン摩擦のスケールファクター(fct_IDF
0の場合) デフォルト = 1.0(実数) |
||
| Gapmin | 衝撃アクティブ化の最小ギャップ (実数) |
|
| Tstart | 開始時間 (実数) |
|
| Tstop | 一時的な非アクティブ化の時間。 (実数) |
|
| IBC | 接触時の境界条件の非アクティブ化フラグ (ブーリアン) |
|
| Inacti | 初期貫通時の剛性の非アクティブ化フラグ 9
(整数) |
|
| VISs | インターフェース剛性の臨界減衰係数 デフォルトは1.0に設定されます(実数) |
|
| Bumult | ソート係数はソートアルゴリズムの高速化に使用されます。 10 デフォルトは0.20に設定されます(実数) |
|
| Ifric | 摩擦定式化フラグ。 12 13
(整数) |
|
| Ifiltr | 摩擦フィルタリングフラグ。 15
(整数) |
|
| Xfreq | フィルタリング係数。 15 (実数) |
|
| sens_ID | インターフェースをアクティブ化 / 非アクティブ化するためのセンサーの識別子 20 識別子センサーが定義されている場合は、インターフェースのアクティブ化 / 非アクティブ化はセンサーに基づき、TstartまたはTstopには基づきません。 (整数) |
|
| fct_IDF | 温度による摩擦係数の関数識別子 デフォルト = 0(整数) |
|
| AscaleF | fct_IDFの横軸のスケールファクター デフォルト = 1.0(実数) |
|
| C1 - C6 | 摩擦則係数。 (実数) |
参照: 表 1 |
| NRadm | 90°の半径を経由する要素の数(Iadm = 2の時のみ用いられます)。 デフォルト = 3(整数) |
|
| Padm | 貫通の割合に関する基準 デフォルト = 1.0(実数) |
|
| Angladm | 角度基準 (実数) |
|
| Kthe | 伝導熱交換係数(fct_IDK = 0の場合) デフォルト = 0.0(実数) |
|
| 熱交換スケールファクター(fct_IDK≠ 0の場合) デフォルト = 0.0(実数) |
||
| fct_IDK | 接触圧力に対する熱交換定義の関数識別子 デフォルト = 0(整数) |
|
| AscaleK | fct_IDKの横軸のスケールファクター デフォルト = 1.0(実数) |
|
| Tint | インターフェース温度 (実数) |
|
| Ithe_form | 熱接触定式化フラグ
(整数) |
|
| Frad | 放射係数 17 (実数) |
|
| Drad | 放射計算の最大距離 (実数) |
|
| Fheat | 摩擦加熱ファクター 18 (実数) |
|
| fct_IDc | 距離の関数としての伝導熱交換係数定義の関数識別子。 19 デフォルト = 0(整数) 22 |
|
| Dcond | 伝導熱交換の最大距離。 23 デフォルト = 0.0(実数) |
|
| IDrby | 剛体の識別子 (整数) |
|
| IDref | 減衰のTYPE21 ID 参照インターフェースの識別子
(整数) |
|
| Damp | 並進臨界減衰係数 19 (実数) |
|
| Dampr | 回転臨界減衰係数 (実数) |
コメント
- SPMDの場合、surf_IDmによって定義される各メインセグメントを1つの要素に関連付ける必要があります(ボイド要素の場合もあります)。
- 接触ギャップ
- Igap = 0(接触ギャップ)の場合、
ギャップはセカンダリサーフェス上、および経時的に一定になり、Gapminと同じになります。さらに、Gapminのデフォルト値は として計算されます。ここで、 はセカンダリシェル要素の平均板厚です。
ギャップが一定の場合、GapmaxおよびFscalegapは使用されません。
入力/PARTでパートの接触板厚が定義されていない場合:
- Igap = 1の場合、セカンダリサーフェス上の可変ギャップは次のように計算されます:
(1) - Igap = 2の場合、セカンダリサーフェス上の経時的な可変ギャップは、次のように計算されます:
(2) また、セカンダリ側のシェルおよび3節点シェルの板厚の変化に応じて、経時的に変化します。
入力/PARTでパートの接触板厚が定義されている場合:
- Igap = 1の場合、可変ギャップは次のように計算されます:
(3) - Igap = 2の場合、可変ギャップは次のように計算されます:
(4) ここで、-
: セカンダリ節点のギャップ
ここで、 は、シェル要素に対するセカンダリ要素の板厚。
3次元ソリッド要素の場合。
- は、パートの接触板厚。
- は、セカンダリ節点の初期板厚。
Igap = 1または2の場合、可変ギャップは常にGapmax以下になり、Gapmaxのデフォルト値は1030に設定され、常にGapmin以上になります(ただし、Gapmaxにデフォルト値はありません)。
-
: セカンダリ節点のギャップ
- Igap = 0(接触ギャップ)の場合、
- アダプティブメッシングの場合:
- Iadm = 1:曲率半径が要素サイズ(セカンダリ側)未満のゾーン(メイン側)で接触が発生した場合は、セカンダリ側の要素が分割されます(最大レベルに到達していない場合)。

図 1. - Iadm = 2:
曲率半径が要素サイズのNRadm倍(セカンダリ側)未満のゾーン(メイン側)で接触が発生した場合は、セカンダリ側の要素が分割されます(最大レベルに到達していない場合)。
法線間の角度がAngladmを超えており、貫通の割合がPadmを超えているゾーン(メイン側)で接触が発生した場合は、セカンダリ側の要素が分割されます(最大レベルに到達していない場合)。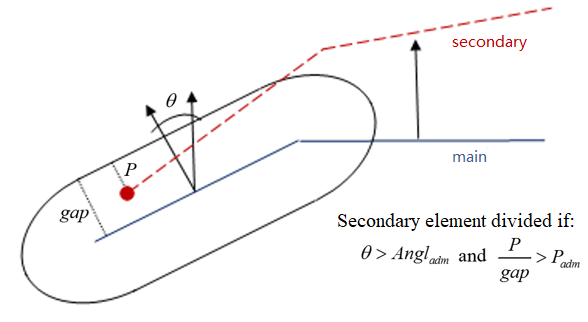
図 2.
- Iadm = 1:
- インターフェースでは、セカンダリ節点とメインサーフェスとの交差が許容されます。セカンダリ節点がDEPTHよりも遠い距離からメインサーフェスに入リ込んだ場合、節点上の接触力は計算されません。
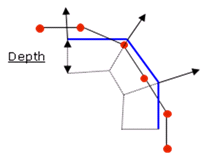
図 3.DEPTHのデフォルト値は、以下の最大値として計算されます:- 全節点中のギャップの上限値(時間0における)
- セカンダリ要素の最小辺長
入力値が0以外の場合、DEPTHは全節点中のギャップの上限値(時間0における)まで引き上げられます。
DEPTHが大きすぎると、接触の検索アルゴリズムのパフォーマンスが低下します。
- 板厚増による最大接触圧力。Pmax はIgap=2の場合にのみ使用されます。
- これは、板厚増が発生した場合に、接触力を制限するために使用できます。
- これは、次の方程式に従って板厚増が発生した場合に、垂直接触力を制限するために使用できます:
(5) - 接線接触力も、フラグITlim = 0の際に、次の方程式に従って制限されます:
(6)
-
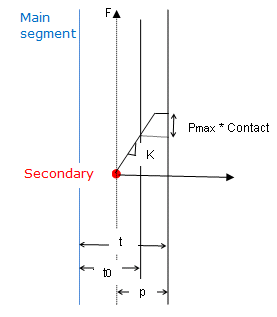
図 4. - Stfacは1.0より大きい値であることが可能です。
- 境界条件の非アクティブ化は、セカンダリ節点に適用されます。
- 節点がスプリング要素に属している場合にInacti = 3であると、初期エネルギーが発生することがあります。
Inacti = 5またはInacti = 6の場合、ギャップはまず縮小され、セカンダリ節点の逆貫通に従って計算値が回復されます。
インターフェースに対する高周波数の影響を回避するためには、Inacti =5ではなく、Inacti = 6が推奨されます。
図 5. - Bumultのデフォルト値は、150万個を超える節点を持つモデルでは0.30に、250万個を超える節点を持つモデルでは0.40に自動的に増やされます。
- 剛性係数の値に制限はありません(ただし、値が1.0より大きいと、最初の時間ステップが短くなる場合があります)。
- 摩擦定式化の場合
- 摩擦フラグIfric = 0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:ここで、 はクーロン摩擦係数。
- fct_IDF = 0の場合
FricはCoulomb摩擦
-
fct_IDF ≠ 0の場合
Fricは、温度に依存するクーロン摩擦係数のスケールファクターになります。(7) ここで、 は、セカンダリとメインの平均温度として取得されるインターフェース温度:(8)
- fct_IDF = 0の場合
- フラグIfric > 0の場合、新しい摩擦モデルが導入されます。この場合、摩擦係数は次の関数によって設定されます:
(9) ここで、- メインセグメントの垂直抗力の圧力
- メインセグメントに相対するセカンダリ節点の接線速度
- 摩擦フラグIfric = 0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:
- 現時点では、新しい摩擦定式化の可変摩擦係数
を定義するには、C1からC6までが使用され(Ifric = 0の場合)、C6は使用されません(Ifric = 1の場合)。以下の定式化を使用できます:
- Ifric = 1(汎用の粘性摩擦則):
(10) - Ifric = 2(修正Darmstad則):
(11) - Ifric = 3(Renard則):
の、
、右記の場合;
、右記の場合;
ここで、
- 第1臨界速度 は、0以外にする必要があります( )。
- 第1臨界速度 は、第2臨界速度 より小さくする必要があります( )。
- 静止摩擦係数 と動摩擦係数 は、最大摩擦 より小さくする必要があります(( かつ )。
- 最小摩擦係数 は、静止摩擦係数 および動摩擦係数 より小さくする必要があります( かつ )。
表 1. 摩擦定式化の単位 Ifric Fric C1 C2 C3 C4 C5 C6 1 2 3 - Ifric = 1(汎用の粘性摩擦則):
- 摩擦の定式化は、剛性(増分)の定式化であり、摩擦力は次のように計算されます:
(12) このとき、粘着力は以下のように計算されます:
ここで、
ここで、 は、メインセグメントがあるセカンダリ節点の接線相対速度
- 摩擦フィルタリング:Ifiltr ≠ 0の場合は、接線力がフィルタを使用して以下のようにスムージングされます:
(13) ここで、α係数は、以下のように計算されます:- Ifiltr = 1の場合: 、単純な数値フィルター
- Ifiltr = 2の場合: 、標準の-3dBフィルターで、 、と はフィルタリング期間
- Ifiltr = 3の場合: 、標準の-3dBフィルターで、Xfreqはカット周波数。
フィルタリング係数Xfreqは、0~1の値にする必要があります。
- 熱交換Ithe= 1(熱伝導をアクティブ化)にすることで、接触の熱交換と熱摩擦を考慮します。
- Ithe_form = 0の場合、熱交換はシェルと一定温度接触Tintの間で行われます。
- Ithe_form = 1の場合、熱交換はすべての接触片間で行われます。
TintはIthe_form=0の場合にのみ使用されます。この場合、メイン側の温度は一定(Tintに等しい)と想定されます。Ithe_form=1の場合、Tintは考慮されません。このため、メイン側の節点温度が考慮されます。
Ithe = 2の場合、熱伝導は熱伝導係数Ktheを使用して、セカンダリ側のみ計算されます。メイン側の温度は一定とはみなされず、各メイン節点で定義された温度場から計算されます。これらの節点温度は、/IMPTEMPを使用して定義された時間と空間によって変化する可能性があります。
熱伝導
Ithe = 1の場合、セカンダリ側の材料は、熱伝導に有限要素定式化を使用する熱材料とする必要があります(/HEAT/MAT)。
熱伝導は、セカンダリ節点がギャップ状態になった場合に計算されます。(14) 熱交換係数- fct_IDK = 0の場合、Ktheは熱交換係数で、熱交換は熱交換サーフェスのみに依存します。
- fct_IDK ≠ 0の場合、Ktheはスケールファクターで、熱交換は接触圧力に依存します:
(15) ここで、 はfct_IDKの関数です。
- 放射:放射が接触で考慮されるのは、 で、セカンダリ節点のメインセグメントまでの距離、 が次の場合です:
(16) ここで、 は放射計算の最大距離です。 のデフォルト値は、以下の最大値として計算されます:- 全節点中のGapの上限値(時間0における)
- セカンダリ要素の最小辺長
の値は、Radioss Engineのパフォーマンスの減少を引き起こすかもしれないため、高すぎる値に設定しないことを推奨します。
熱伝導の放射は以下のように計算されます:(17) ここで、(18) ここで、- シュテファンボルツマン定数
- セカンダリサーフェスの輻射率
- メインサーフェスの輻射率
- 熱摩擦
- インターフェースでIthe > 0である場合、摩擦エネルギーは熱に変換されます。
- Fheatは、熱に変換されてセカンダリ側に伝達される、このエネルギーの一部として定義されます。
- 熱摩擦QFricは、剛性定式化のために次のように定義されます:
(19)
- 臨界減数係数によって、特に荷重が適用されるツールに対して、動的効果を軽減できます。これは油圧系プレスシステムのモデル化に使用できます。
減衰荷重(同様にトルク)は、下記のようにツールに適用されます。
(同様に)
ここで、 同様に
ここで、
はツール質量mass(同様に慣性 )における臨界減衰のパーセンテージです。
は全インターフェース剛性(同様に回転剛性 )です。
(同様に )は、 IDrefが0に等しい場合はツールの併進(同様に回転)速度であり、そうでない場合は、インターフェースIDrefのツールに関する相対速度です。
- インターフェースのアクティブ化 / 非アクティブ化のためにsens_IDが定義されている場合、TstartおよびTstopは考慮されません。
- Invn = 1の場合、Radiossは、メイン法線が空白の方向を向いているか否かをチェックします。正しく方向付けされていない法線は、大きなペナルティと誤った結果をもたらす可能性があります。これが起こってしまった場合、この問題が検出されたときに計算を停止することが重要です。このオプションは、最初の衝撃の際にセカンダリ節点が正しい側(図 6)からのメインセグメントを含んでいるか動かをチェックします。そうでない場合、エラーメッセージが出て計算は停止されます。
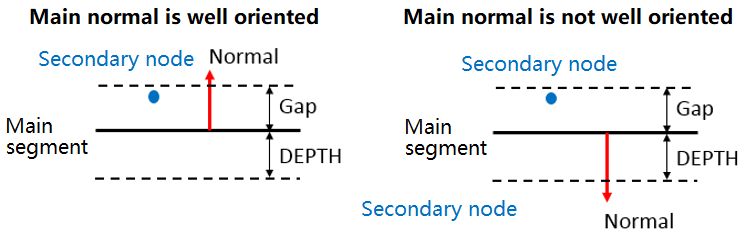
図 6.- メイン法線の方向が正しい場合: 1つ目の衝撃は正しい側からです(ペナルティはGapより小さい)。
- メイン法線の方向が正しくない場合:1つ目の衝撃は正しくない側からです(ペナルティはDEPTHとほとんど等しい)。
このオプションはシェル要素にのみ使用でき、特別な注意を払って使用されるべきです。法線が正しい方向を向いていても、大きな初期ペナルティがある場合は計算は停止されます。
- fct_IDc ≠0の場合、Gap < d ≤ Dcondのときは、熱伝達係数は距離dの関数として変化することができます。
この関数の横軸と縦軸は0から1の間である必要があります。
熱伝達係数は以下のように計算されます:(20) Ktheが一定の場合、 の最大値はKtheの値と等しくなります。そうでなければ、Ktheが圧力に依存する場合、接触圧力 =0に対して最大値はKtheの値に等しくなります。
は、距離がDcondに等しい場合、ゼロに低下します。
- fct_IDc≠0の場合、熱伝達は以下として計算されます:
- 伝導熱伝達(d < Gapの場合)
- 伝導および放射熱伝達(Gap < d ≤ Dcondの場合)
- 放射熱伝達(Dcond < d ≤ Dradの場合)
- fct_IDc ≠ 0およびDcond = 0の場合、Dcond=Dradとなります。
Frad ≠ 0、fct_IDc ≠ 0、およびDrad = 0の場合、Drad = Dcondとなります。