/INTER/TYPE19
ブロックフォーマットのキーワード これは、2つの対称性インターフェースTYPE7と1つのTYPE11インターフェースを組み合わせたもので、同じセカンダリ / メインサーフェスに基づく共通の入力を持ちます。インターフェースTYPE7のセカンダリ節点グループ、および同等のTYPE11のインターフェースで使用されるセカンダリおよびメインのラインセグメントは、これらの入力サーフェスから実質的に生成されます。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE19/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| surf_IDs | surf_IDm | Istf | Ithe | Igap | Iedge | Ibag | Idel | Icurv | |
| Fscalegap | Gapmax | ||||||||
| Stmin | Stmax | %mesh_size | dtmin | Irem_gap | Irem_i2 | ||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| node_ID1 | node_ID2 |
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Stfac | Fric | Gapmin | Tstart | Tstop | |||||
| IBC | Inacti | VISs | VISF | Bumult | |||||
| Ifric | Ifiltr | Xfreq | Iform | sens_ID | fric_ID | ||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | |||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C6 | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kthe | fct_IDK | Tint | Ithe_form | AscaleK | |||||
| Frad | Drad | Fheats | Fheatm | ||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| inter_ID | インターフェースの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子。 (整数、最大10桁) |
|
| inter_title | インターフェースのタイトル (文字、最大100文字) |
|
| surf_IDs | セカンダリサーフェスの識別子 (整数) |
|
| surf_IDm | メインサーフェスの識別子 (整数) |
|
| Istf | 剛性定義フラグ 8
(整数) |
|
| Ithe | 熱接触フラグ。 25
(整数) |
|
| Igap | ギャップ/要素オプションフラグ 6 7
(整数) |
|
| Iedge | エッジとエッジの接触のフラグ 24
(整数) |
|
| Ibag | 接触時のエアバッグベントホール閉鎖フラグ
(整数) |
|
| Idel | 節点およびセグメントの削除フラグ。 5
(整数) |
|
| Icurv | 曲率のあるセカンダリギャップ 11 12 13
(整数) |
|
| Fscalegap | ギャップスケールファクター(Igap = 3の際にのみ使用) デフォルト = 1.0(実数) |
|
| Gapmax | 最大ギャップ(Igap = 3の際にのみ使用)
(実数) |
|
| Stmin | 最小剛性 (実数) |
|
| Stmax | 最大剛性 デフォルト = 1030(実数) |
|
| %mesh_size | メッシュサイズのパーセンテージ(Igap = 3の場合にのみ使用) デフォルト = 0.4(実数) |
|
| dtmin | 最小インターフェース時間ステップ 23 (実数) |
|
| Irem_gap | 自己接触において要素サイズがギャップ値より小さい場合にセカンダリ節点またはファインを非アクティブ化するためのフラグ 15
(整数) |
|
| Irem_i2 | /INTER/TYPE2で同じ接触ペア(節点)が定義されている場合に、セカンダリ節点を非アクティブにするためのフラグ。
|
|
| node_ID1 | 第1節点識別子 (整数) |
|
| node_ID2 | 第2節点識別子 (整数) |
|
| Stfac | インターフェース剛性(Istf = 1の場合) デフォルト = 1.0(実数) |
|
| インターフェースの剛性スケールファクター(Istf ≠ 1の場合) デフォルト = 0.0(実数) |
||
| Fric | Coulomb摩擦。 (実数) |
|
| Gapmin | 衝撃アクティブ化の最小ギャップ 7 (実数) |
|
| Tstart | 開始時間 (実数) |
|
| Tstop | 一時的な非アクティブ化の時間。 (実数) |
|
| IBC | 接触時の境界条件の非アクティブ化フラグ (ブーリアン) |
|
| Inacti | 初期貫通時の剛性の非アクティブ化フラグ 14
(整数) |
|
| VISs | インターフェース剛性の臨界減衰係数 デフォルトは0.05に設定されます(実数) |
|
| VISF | 接触面摩擦の臨界減衰係数 デフォルトは1.0に設定されます(実数) |
|
| Bumult | ソート係数。 デフォルトは0.20に設定されます(実数) |
|
| Ifric | 摩擦定式化フラグ。 19 20 fric_IDが定義されていない場合のみ使用されます。
(整数) |
|
| Ifiltr | 摩擦フィルタリングフラグ。 21
(整数) |
|
| Xfreq | フィルタリング係数。 21 (実数) |
|
| Iform | 摩擦ペナルティ定式化のタイプ。
(整数) |
|
| sens_ID | インターフェースをアクティブ化 / 非アクティブ化するためのセンサーの識別子 2 識別子センサーが定義されている場合は、インターフェースのアクティブ化 / 非アクティブ化はセンサーに基づき、TstartまたはTstopには基づきません。 (整数) |
|
| fric_ID | 選択されたパートのペアについての摩擦定義の摩擦識別子
(整数) |
|
| C1 - C6 | 摩擦則係数。 (実数) |
参照: 表 1 |
| Kthe | 熱交換係数(fct_IDK = 0の場合) デフォルト = 0.0(実数) |
|
| 熱交換スケールファクター(fct_IDK ≠ 0の場合) デフォルト = 1.0(実数) 25 |
||
| fct_IDK | 接触圧力に対する熱交換定義の関数識別子 デフォルト = 0(整数) |
|
| Tint | インターフェース温度 25 (実数) |
|
| Ithe_form | 熱接触定式化フラグ
(整数) |
|
| AscaleK | fct_IDKの横軸のスケールファクター デフォルト = 1.0(実数) |
|
| Frad | 放射係数 27 (実数) |
|
| Drad | 放射計算の最大距離 (実数) |
|
| Fheats | セカンダリの摩擦加熱ファクター 26 (実数) |
|
| Fheatm | セカンダリの摩擦加熱ファクター (実数) |
境界条件の非アクティブ化フラグ:IBC
| (1)-1 | (1)-2 | (1)-3 | (1)-4 | (1)-5 | (1)-6 | (1)-7 | (1)-8 |
|---|---|---|---|---|---|---|---|
| IBCX | IBCY | IBCZ |
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| IBCX | 衝撃時のX境界条件の非アクティブ化フラグ
(ブーリアン) |
|
| IBCY | 衝撃時のY境界条件の非アクティブ化フラグ
(ブーリアン) |
|
| IBCZ | 衝撃時のZ境界条件の非アクティブ化フラグ
(ブーリアン) |
コメント
- 接触のメインおよびセカンダリサーフェスは次の方法で定義されます。単一のサーフェス自己接触およびエッジ-エッジ自己接触
- surf_IDs > 0およびsurf_IDm = 0
- surf_IDs = 0およびsurf_IDm > 0
対称性サーフェス-サーフェスおよびエッジ-エッジ接触- surf_IDs > 0およびsurf_IDm > 0
- インターフェースのアクティブ化 / 非アクティブ化のためにsens_IDが定義されている場合、TstartおよびTstopは考慮されません。
- SPMDの場合、surf_IDmによって定義される各メインセグメントを1つの要素に関連付ける必要があります(ボイド要素の場合もあります)。
- フラグIbagについては、モニター体積オプション(モニター体積(エアバッグ))をご参照ください。
- フラグ Idel = 1のCPUコストはIdel = 2よりも高くなります。
- 可変ギャップは次のように計算されます:
- Igap = 1の場合:
(1) - Igap = 3の場合:
(2) - Igap = 4の場合:節点-サーフェス接触は、可変ギャップを使用します。
(3) 自己接触の場合、要素サイズがギャップ値より小さいと、セカンダリ節点は近傍のメインセグメントについて非アクティブ化されます。こあれは、/INTER/TYPE7, Irem_gap = 2の使用と同じです。エッジ-エッジ接触は、Gapminに定義される一定ギャップを使用します。
-
ここで、
-
- : メイン要素のギャップ
- ここで、 シェル要素に対するメイン要素の板厚
-
- : セカンダリ節点のギャップ:
- = 0(セカンダリ節点がどの要素にも結合されていないか、3次元ソリッド要素またはスプリング要素にのみ結合されている場合)
-
- : 要素の短いエッジの長さ
- セカンダリ節点が複数のシェルおよび/またはビームまたはトラスに結合されている場合は、計算された中で最も大きいセカンダリギャップが使用されます。
-
- Igap = 1の場合:
- Gapminのデフォルト値は、次のように計算されます:
(4) このとき、- メインサーフェスのギャップ
- シェル要素に対するメイン要素の平均板厚
- メインソリッド要素の平均辺長
- すべてのメインセグメント(シェルまたは3次元ソリッド)の中の最小辺長
- セカンダリサーフェスのギャップ。
- 接触剛性:節点対3節点および4節点セグメントまたは2節点セグメント対2節点セグメントの接触の計算は、以下のようになります:
(5) ここで、-
は、メインセグメントの剛性
とセカンダリ節点の剛性
の両方から計算されます:
Istf = 2、
Istf = 3、
Istf = 4、
Istf = 5、
-
はメインセグメントの剛性で、次のように計算されます:メインセグメントがシェル上に存在するか、シェルとソリッドによって共有されている場合
(6) メインセグメントがソリッド上に存在する場合。(7) ここで、- セグメント面積
- ソリッドの体積
- 体積弾性率
-
はインターフェースTYPE7として考慮される相当節点剛性で、次のように計算されます:節点がシェル要素に結合されている場合:
(8) 節点がソリッド要素に結合されている場合:(9)
剛性係数Stfacの値に制限はありません(ただし、値が1.0より大きいと、最初の時間ステップが短くなる場合があります)。
/PROP/VOIDと/MAT/VOIDを使用する際、ボイド材料の材料プロパティと板厚が入力されなければなりません。そうしないと、ボイド要素の接触合成はゼロになります。シェル要素の剛性が接触計算に使用されるため、これは、ボイドシェル要素がソリッド要素と要素を共有する場合に特に重要です。
-
は、メインセグメントの剛性
とセカンダリ節点の剛性
の両方から計算されます:
- Igap ≠ 3の場合、行4で指定された値は無視されます。
- Istf < 1の場合、行5で指定された値は無視されます。
- 球面曲率(Icurv = 1)は、node_ID1(球の中心)を使用して定義されます。
- Icurv = 1の場合、行6で指定されたnode_ID2は無視されます。
- 円筒曲率(Icurv = 2)は、(円筒形の軸上にある)node_ID1およびnode_ID2を使用して定義されます。
- 節点がスプリング要素に属している場合にInacti = 3であると、初期エネルギーが発生することがあります。インターフェースに対する高周波数の影響を回避するためには、Inacti =5ではなく、Inacti = 6が推奨されます。

図 1. - Irem_gap = 2を使用すると、要素サイズをギャップ値よりも小さくできます:
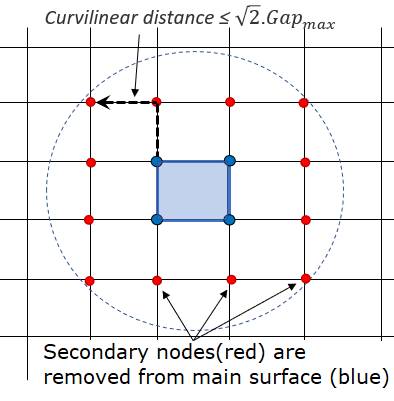
図 2. 節点対サーフェス接触から消去されたセカンダリ節点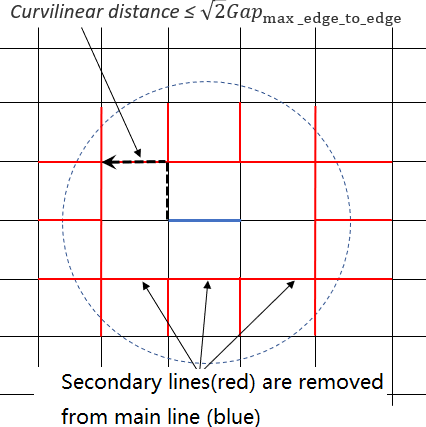
図 3. エッジ対エッジ接触から消去されたセカンダリライン自己接触の場合、Curvilinearが より小さい場合(初期構成において)、このセカンダリエンティティ(節点 / ライン)はこのメインエンティティ(サーフェス / ライン)で考慮されません。セカンダリエンティティは、他のメインエンティティの接触からは削除されません。これは/INTER/TYPE7および/INTER/TYPE11のコメントに記載されているとおり、節点対サーフェスとエッジ対エッジ接触にも当てはまります。
- ソートアルゴリズムを高速化するには、ソート係数Bumultを使用します。
- ソート係数Bumultはマシンによって異なります。
- 1つの節点が2つのサーフェスに同時に属することができます。
- fric_IDが定義されている場合、接触摩擦は/FRICTIONで定義され、この入力カード内の摩擦入力(Ifric、C1など)使用されません。摩擦定式化の場合:
- 摩擦のフラグIfricがどうであれ、TYPE11インターフェースで使用されるクーロン摩擦係数は:
(10) - 摩擦のフラグIfricはTYPE7インターフェースにのみ適用されます。
- 摩擦フラグIfric = 0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:
(11) ここで、 、 はクーロン摩擦係数。
- フラグIfric > 0の場合、新しい摩擦モデルが導入されます。この場合、摩擦係数は関数
によって設定されます。ここで、
- メインセグメントの垂直抗力の圧力
- メインセグメントに相対するセカンダリ節点の接線速度
- 摩擦のフラグIfricがどうであれ、TYPE11インターフェースで使用されるクーロン摩擦係数は:
- 現在は、係数C1~C6を使用して、新しい摩擦定式化の可変摩擦係数
を定義しています。
- Ifric = 1(汎用の粘性摩擦則):
(12) - Ifric = 2(修正Darmstad則):
(13) - Ifric = 3(Renard則):
の、
、右記の場合;
、右記の場合;
ここで、 - 第1臨界速度 は、0以外にする必要があります( )。
- 第1臨界速度 は、第2臨界速度 より小さくする必要があります( )。
- 静止摩擦係数 と動摩擦係数 は、最大摩擦 より小さくする必要があります( かつ )。
- 最小摩擦係数 は、静止摩擦係数 および動摩擦係数 より小さくする必要があります( かつ )。
表 1. 摩擦定式化の単位 Ifric Fric C1 C2 C3 C4 C5 C6 1 2 3 - Ifric = 1(汎用の粘性摩擦則):
- 摩擦フィルタリング:Ifiltr ≠ 0の場合は、接線力がフィルタを使用して以下のようにスムージングされます:
(14) ここで、α係数は、以下のように計算されます:- Ifiltr = 1の場合: 、単純な数値フィルター
- Ifiltr = 2の場合: 、標準の-3dBフィルターで、 、と はフィルタリング期間
- Ifiltr = 3の場合:
、標準の-3dBフィルターで、
はカット周波数。
フィルタリング係数 は、0~1の値にする必要があります。
- 摩擦ペナルティ定式化Iform
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです:
(15) このとき、粘着力は以下のように計算されます:
ここで、
- Iform = 2の粘性定式化の場合、摩擦力は次のとおりです:
(16) このとき、粘着力は以下のように計算されます:
ここで、
は、メインセグメントに相対するセカンダリ節点の接線速度
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです:
- この接触内のセカンダリ節点の時間ステップがdtminより小さくなると、セカンダリ節点は接触から消去され、警告のメッセージが出力ファイルに書き出されます。このdtmin値は、/DT/INTER/DEL内に入力されるあらゆるモデルインターフェースの最小タイムステップより優先されます。
- エッジ-エッジの接触のフラグIedge:
- Iedge = 1: 外部エッジのみが、シェルパートで定義された接触サーフェスから生成されます。これは、最適化されたパフォーマンスに推奨されます。サーフェスにソリッドパートしか含まれていない場合、空白の行が発生し、エラーメッセージが出力されるため、使用できません。
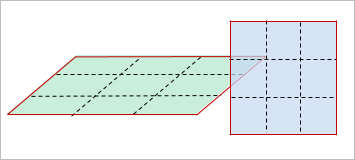
図 4. - Iedge = 2: すべてのエッジは接触サーフェスから生成されます。
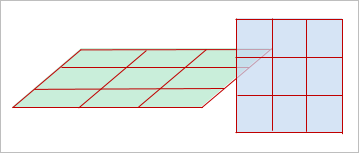
図 5.
- Iedge = 1: 外部エッジのみが、シェルパートで定義された接触サーフェスから生成されます。これは、最適化されたパフォーマンスに推奨されます。サーフェスにソリッドパートしか含まれていない場合、空白の行が発生し、エラーメッセージが出力されるため、使用できません。
- 熱交換:Ithe=1(熱伝導をアクティブ化)にすることで、接触の熱交換と熱摩擦を考慮します。
- Ithe_form = 0の場合、熱交換はシェルと一定温度接触Tintの間で行われます。
- Ithe_form = 1の場合、熱交換はすべての接触片間で行われます。
TintはIthe_form=0の場合にのみ使用されます。この場合、メイン側の温度は一定(Tintに等しい)と想定されます。Ithe_form=1の場合、Tintは考慮されません。このため、メイン側の節点温度が考慮されます。
熱交換係数:- fct_IDK = 0の場合、Ktheは熱交換係数で、熱交換は熱交換サーフェスのみに依存します。
- fct_IDK ≠ 0の場合、Ktheはスケールファクターで、熱交換は接触圧力に依存します:
(17) - ここで、 はfct_IDKの関数です。
- 熱摩擦:
- インターフェースでIthe > 0である場合、摩擦エネルギーは熱に変換されます。
- FheatsとFheatmは摩擦エネルギーの比率で、エネルギーがこの比率でそれぞれセカンダリ側とメイン側に分配されます。したがって一般的に:
(18) FheatsとFheatmがいずれも0であると、摩擦スライディングエネルギーから熱への変換はアクティブになりません。
- 摩擦熱QFricは、以下のように定義されます:
- Iform= 2の場合(剛性定式化):セカンダリ側:
(19) メイン側:(20) (Ithe_form=1) - Iform= 1の場合(ペナルティ定式化):セカンダリ側:
(21) メイン側:(22) (Ithe_form=1)
- Iform= 2の場合(剛性定式化):
- 放射:放射が接触で考慮されるのは、 で、セカンダリ節点のメインセグメントまでの距離、 が次の場合です:
(23) ここで、 は放射計算の最大距離です。 のデフォルト値は、以下の最大値として計算されます:- 全節点中のGapの上限値(時間0における)
- セカンダリ要素の最小辺長
の値は、Radioss Engineのパフォーマンスの減少を引き起こすかもしれないため、高すぎる値に設定しないことを推奨します。
熱伝導の放射は以下のように計算されます:(24) ここで、(25) ここで、- シュテファンボルツマン定数
- セカンダリサーフェスの輻射率
- メインサーフェスの輻射率