/INTER/TYPE6
ブロックフォーマットのキーワード このインターフェースを使用して、接触力の表形式入力を使用した2つの剛体間の接触をシミュレートします。このインターフェースはインターフェースTYPE3と同様に機能します。これらのボディ間の接触力は、最大貫通の関数として入力できます。このインターフェースを使用すると、除荷するための力の関数を入力することもできます。
内容
このインターフェースでは、以下の条件が満たされる必要があります。
- 2つの接触サーフェスのセグメントは相互に向かい合っている必要があります(例: サーフェス法線は一方のサーフェスからもう一方のサーフェスに向いている必要があります)。
- このインターフェースは、ソリッド要素またはシェル要素に結合されているセグメントでのみ機能します。したがって、2つの接触サーフェスは同じ節点を共有していてはいけません(2つの異なる剛体の一部である必要があります)。
- ユーザー定義のインターフェース剛性によって時間ステップを短縮できます。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE6/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| surf_ID1 | surf_ID2 | ||||||||
| Sfric | Fric | Gap | Tstart | Tstop | |||||
| IRS | IRm | Inacti | fct_IDff | fct_IDfv | Ascalef | Ascalev | |||
| fct_IDId | Iform | Ascalex | FscaleId | Icor | |||||
| fct_IDul | Stiff | Fscaleul | |||||||
| Visc | fct_IDdv | fct_IDdf | Fscalev | ||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| inter_ID | インターフェースの識別子 (整数、最大10桁) |
|
| unit_ID | 単位の識別子 (整数、最大10桁) |
|
| inter_title | インターフェースのタイトル (文字、最大100文字) |
|
| surf_ID1 | 剛体サーフェス1の識別子 (整数) |
|
| surf_ID2 | 剛体サーフェス2の識別子 (整数) |
|
| Sfric | 静的摩擦力 (実数) |
|
| Fric | Coulomb摩擦。 (実数) |
|
| Gap | 衝撃アクティブ化のギャップ。 (実数) |
|
| Tstart | インターフェースのアクティブ化時間 デフォルト = 0.0(実数) |
|
| Tstop | インターフェースの非アクティブ化時間 デフォルト = 1.0e30(実数) |
|
| IRS | 第1サーフェスのセグメントの番号付け替えフラグ
(整数) |
|
| IRm | 第2サーフェスのセグメントの番号付け替えフラグ(IRSと同じ)
(整数) |
|
| Inacti | 初期貫通時の剛性の非アクティブ化フラグ
(整数) |
|
| fct_IDff | 摩擦増倍係数関数と垂直抗力の比率 (整数) |
|
| fct_IDfv | 摩擦増倍係数関数とスライディング速度の比率 (整数) |
|
| Ascalef | 速度の関数の横軸スケールファクター(fct_IDffおよびfct_IDdv) (実数) |
|
| Ascalev | 力の関数の横軸スケールファクター(fct_IDffおよびfct_IDdv) (実数) |
|
| fct_IDId | 荷重対貫通曲線関数の識別子 この関数は、荷重と変位の両方で正でなければなりません。 (整数) |
|
| Iform | 接触定式化フラグ 1
(整数) |
|
| Ascalex | fct_IDIdとfct_IDulの横軸スケールファクター デフォルト = 1.0(実数) |
|
| FscaleId | fct_IDIdの縦軸スケールファクタ デフォルト = 1.0(実数) |
|
| Icor | 初期交差に起因する力の調整フラグ 2
(整数) |
|
| fct_IDul | 荷重対貫通曲線の除荷関数の識別子 この関数は、荷重と変位の両方で正で、かつ、載荷曲線より常に下でなければなりません。 Iform = 2の場合は使用しません。 (整数) |
|
| Stiff | 曲線間を移動する際は、載荷 / 除荷剛性を使用。 Iform = 1、2の場合、入力が必要 |
|
| Fscaleul | 除荷fct_IDulの縦軸スケールファクター デフォルト = 1.0(実数) |
|
| Visc | 減衰係数。 (実数) |
|
| fct_IDdv | 減衰力関数と貫通速度の比率 (整数) |
|
| fct_IDdf | 減衰増倍係数関数と垂直抗力の比率 (整数) |
|
| Fscalev | fct_IDdvの縦軸スケールファクタ (実数) |
コメント
- 載荷曲線fct_IDIdを常に指定する必要があります。
Iform =0の場合は、除荷曲線は考慮されず、載荷と除荷では同じ曲線fct_IDIdが使用されます。
Iform =1の場合は、除荷曲線fct_IDulが考慮されて、以下のようになります:- 除荷曲線fct_IDulが定義されていない場合は、載荷はfct_IDIdに従い、除荷は、傾きStiffの直線を0まで下り、そのまま0を維持します。再度載荷すると、Radiossは傾きStiffの直線に沿って0から載荷関数fct_IDIdにジャンプします。
- 載荷曲線と除荷曲線の両方が定義されている場合は(除荷曲線は載荷曲線より下方に位置する必要があります)、除荷時にRadiossは傾きStiffの直線に沿って載荷曲線から除荷曲線にジャンプします。再度載荷すると、Radiossは傾きStiffの直線に沿って除荷曲線fct_IDulから載荷曲線fct_IDIdにジャンプします。
いくつかのケースを以下に示します。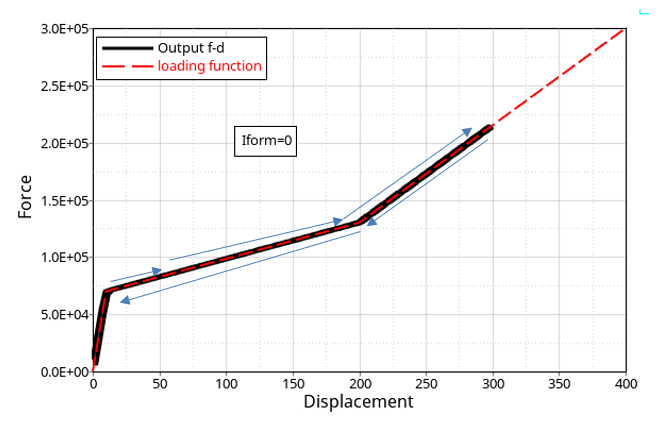
図 1. Iform = 0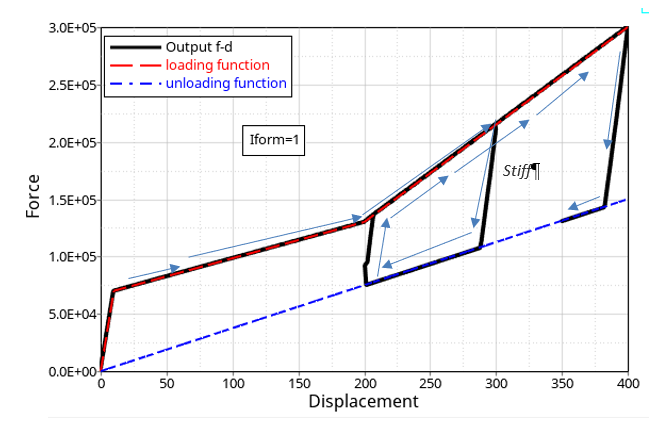
図 2. Iform = 1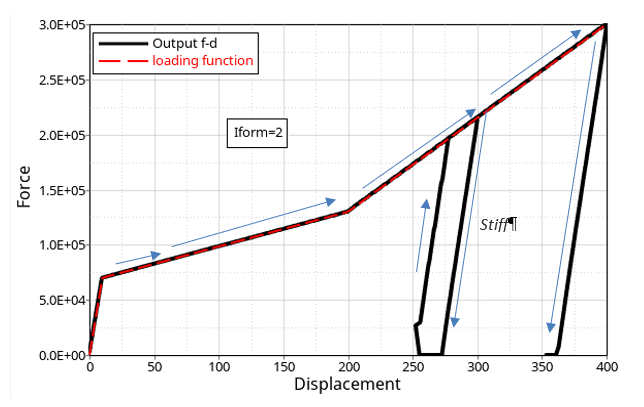
図 3. Iform = 2 - Iform =1およびIcor =1の場合は、t=0におけるインターフェース力は、除荷関数fct_IDulから得られる値(初期貫通に対応する値)に設定されます。除荷関数が定義されていない場合は、初期荷重は0に設定されます。
- 接線摩擦力Ftは以下のように計算されます:
(1) ここで、- 節点力
- ( 、 、
- 次のように定義される動摩擦係数
(2) ここで、- スライディング速度
- および
- fct_IDffおよびfct_IDの関数fv
- 減衰荷重Fdampは下記のように定義されます:
(3) ここで、- 貫通速度
- および
- fct_IDdfおよびfct_IDの関数dv