/FRIC_ORIENT
ブロックフォーマットのキーワード 接触インターフェースTYPE7、TYPE19、TYPE24、およびTYPE25で、メインサーフェスの直交異方性接触摩擦の特定の方向を定義します。
これらの方向は、直交異方性摩擦モデルが/FRICTIONIdir=1で定義されている場合に使用されます。シェル要素のみがサポートされます。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /FRIC_ORIENT/fric_ID | |||||||||
| friction_orientation_title | |||||||||
これらの2行を繰り返し、特定のパートまたはパートのグループに異なる摩擦方向値を定義します。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /FRIC_ORIENT/fricorient_ID | |||||||||
| friction_orientation_title | |||||||||
| grpart_ID | part_ID | ||||||||
| VX | VY | VZ | Skew_ID | Iorth | |||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| fric_ID | 摩擦識別子 (整数、最大10桁) |
|
| friction_orientation_title | 摩擦モデルのタイトル (文字、最大100文字) |
|
| grpart_ID | パートグループの識別子/GRPART (整数) |
|
| part_ID | パート識別子 grpart_IDが定義されている場合は無視されます。 (整数) |
|
| VX | 参照ベクトルのX成分 デフォルト = 1.0(実数) |
|
| VY | 参照ベクトルのY成分 デフォルト = 1.0(実数) |
|
| VZ | 参照ベクトルのZ成分 デフォルト = 1.0(実数) |
|
| Skew_ID | 参照ベクトルのスキュー識別子 2 局所スキューを定義する場合は、そのX軸が全体ベクトル に取って代わります。 VX、VY、VZ座標は無視されます。 デフォルト = 0(整数) |
|
| Angle 2 (実数) |
||
| Iorth | 参照ベクトル用の直交異方性座標系定式化フラグ
(整数) |
例
#RADIOSS STARTER
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FRICTION/999
test no 1
# Ifric Ifiltr Xfreq Iform
0 0 0 2
# default friction for rest parts which not specifically defined below
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .2 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part group ID 111 and ID 222
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
111 222 0 0 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .1 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part ID 1 and ID 3
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
0 0 1 3 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .2 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part ID 1 and ID 4; orthotropic direction considered
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
0 0 1 4 1
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .4 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .2 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part ID 1 and ID 5
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
0 0 1 5 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .3 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/INTER/TYPE7/2
New INTER 2
# Slav_id Mast_id Istf Ithe Igap Ibag Idel Icurv Iadm
9 10 4 0 2 0 1 0 0
# Fscalegap Gap_max Fpenmax
0 0 0.8
# Stmin Stmax %mesh_size dtmin Irem_gap Irem_i2
1 0 0 0 0 0
# Stfac Fric Gapmin Tstart Tstop
0 .35 2.1 0 0
# IBC Inacti VisS VisF Bumult
000 6 0 0 0
# Ifric Ifiltr Xfreq Iform sens_ID fct_IDf AscaleF fric_ID
0 0 0 2 0 0 0 0
/GRNOD/PART/9
INTER_group_9_of_SURF
4 5
/SURF/PART/10
INTER_group_10_of_PART
1
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FRIC_ORIENT/1
define orientation of part ID 1
# GRpartID PartID
1
# Vx Vy Vz skew_ID Phi Iorth
1 0 1 45
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|| パート | Idir | 摩擦係数 | |
|---|---|---|---|
| 列挙されていないすべてのパート | - | 0.2 | |
| /GRPART/111 - /GRPART/222 | 0: 等方性 | 0.1 | |
| part_ID1 - part_ID3 | 0: 等方性 | 0.2 | |
| part_ID1 - part_ID4 | 1: 直交異方性 | Dir1 = 0.4 | Dir2 = 0.2 |
| part_ID1 - part_ID5 | 0: 等方性 | 0.3 | |
この例では、パート1とパート4の間の摩擦の直交異方性方向は、/FRIC_ORIENT/1のベクトルと角度によって定義されています。
コメント
- これらの摩擦方向で、定義されたパートのプロパティで定義されている直交異方性方向が置換されます。
- 2つの方法による局所座標系における直交異方性:
- Skew_ID =0: 全体ベクトル (行4で定義されている成分)と層ごとの角度 (単位は度)で定義される直交方向
- Skew_ID ≠0: スキュー(スキューでのX軸は全体ベクトル に取って代わる)と角度 (単位は度)で定義される直交異方性方向。
いずれの方法(ベクトル で、またはスキューで)も、ベクトル またはスキューのX軸のシェル要素上への投影は、ベクトル になります。直交異方性方向(方向1)はベクトル を 度回転(正の方向はシェルの法線 に基づく)。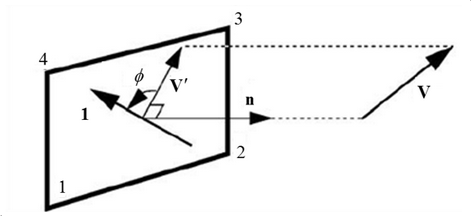
図 1.