RD-E:4500 マルチドメイン
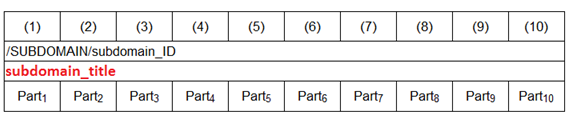
全体モデルをメインドメインとサブドメインに分割し、それぞれをその時間ステップで解きます。新しいマルチドメイン単一ファイル入力フォーマットではサブドメイン定義を/SUBDOMAINキーワードで行います。
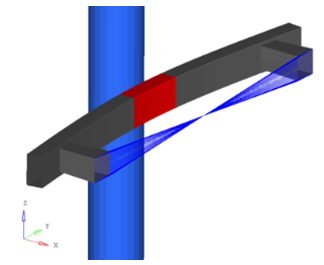
図 1.
使用されるオプションとキーワード
- マルチドメイン分割(/SUBDOMAIN)
- マルチドメイン連成(/RAD2RAD/ON)
- /INTER/TYPE2
- Starterのbumper_LL4_0000.radに/SUBDOMAIN
注: /SUBDOMAIN内の“
subdomain_title”はサブドメインEngineファイルroot_nameと同じにする必要があります。この例題では/SUBDOMAIN内の“
subdomain_title”は“FINE_MESH”です。これにより、サブドメインのEngineは“FINE_MESH_0001.rad”となります。 - 両方のエンジンファイルに/RAD2RAD/ONが存在する必要があります:
マルチドメインテクニックを用いるためには、マルチドメイン連成が確立できるように両方のEngineファイルに/RAD2RAD/ONが定義される必要があります。
ドメイン間の接触
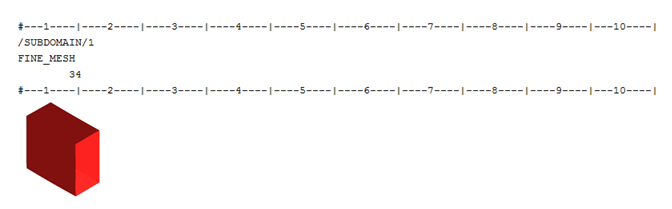
図 3.
- 2つの内部接触インターフェース(/INTER/TYPE7)、それぞれのインターフェースはそのドメインで取り扱われます:
- 接触インターフェース1
- メインドメインの自己接触インターフェース
- 接触インターフェース2
- サブドメインの自己接触インターフェース
- サブドメインでのドメイン間の相互作用のための2つの接触インターフェース(/INTER/TYPE7) :
- 接触インターフェース3
- サブフレーム / 車両の接触 – サブフレームがセカンダリ側
- 接触インターフェース4
- 車両 / サブフレームの接触 – サブフレームがメイン側
この場合、全ての接触が1つの接触(/INTER/TYPE7)で取り扱われた場合、モデルの全ての要素がサブドメインに衝突する可能性があり、モデルの全ての要素がサブドメインに複製されます。モデルが大きい場合、マルチドメインインターフェースが巨大になり得るため、RAD2RADのCPUコストが非常に高くなります。それ故、計算のパフォーマンスが非常に貧弱になります。この場合ワーニングのメッセージ“Multi-Domains interface is too big”がStarterにより出力されます。
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
モデル概要
バンパービームが剛な円柱(直径254 mm)に初速度5m/sで衝突します。バンパーの後ろのクラッシュボックスは、x方向の併進を除いて全て拘束されます。そのピラーは全ての方向に拘束されます。
単位: mm、ms、Kg、N、 GPa
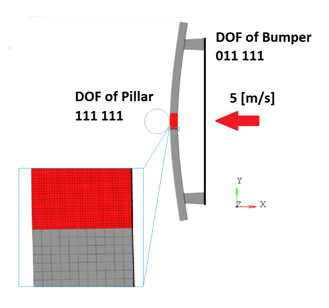
図 4. 問題の詳細
モデリング手法
より正確な結果を得るためには、興味のある範囲に細かいメッシュを用います(例えば変形の大きい位置)。この例題では、バンパーが大きく変形する衝撃を受けるエリア(赤でハイライトされた部分)が選ばれました。細かいメッシュのサイズは約2 mmであり、残りのパートのメッシュサイズは約7 mmです。細かいメッシュのパートはモデル全体のほぼ50%を表す18370個のシェル要素を持ちます。陽解法解析では時間ステップはこの細かいメッシュでコントロールされます。この計算のパフォーマンスを改善するために、この計算は通常古典的なマススケーリング(/DT/NODA/CST)で取り扱われます。マルチドメインテクニックを用いることにより、細かいメッシュのパートに小さな時間ステップを、粗いメッシュのパートに大きな時間ステップを用いることが可能になります。
マルチドメインテクニックを用いるには2つの異なった方法があります。第1の(古い)方法は、ユーザーがそれぞれのドメインに分離されたStarterとEngineファイルを作成し、ドメイン間の結合に/LINKキーワードを定義する方法です。
Radioss v11.0.220で、マルチドメイン単一入力フォーマットという新しい機能が導入されました。キーワード/SUBDOMAINを用いてパートをこの中に入れて新しいサブドメインに異なる時間ステップを用いることができるようになり、特定の時間ステップのEngineファイルを生成します。Radiossは自動的にサブドメインと2つのドメインの間の結合のリンクの情報を生成します。
結果
- 試験1:単一ドメイン - 自由DTコントロール
- 試験2:マルチドメイン - 自由DTコントロール
| テスト | 単一ドメイン(1)自由DTコントロール | マルチドメイン (2) | |
|---|---|---|---|
| マスタードメイン自由DTコントロール | サブドメイン自由DTコントロール | ||
| CPU | 1 | 1 | 1 |
| 時間ステップ [ms] | 2E-04 | 8E-04 | 2E-04 |
| CPU時間 [s] | 5.93E+03 | 0.67E+03 | 2.64E+03 |
| 経過時間 [s] | 5.9E+03 | 3.3E+03 | |
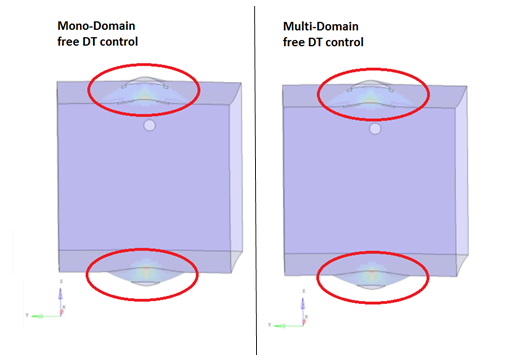
図 5. 2つのテストのクラッシュボックスの破壊
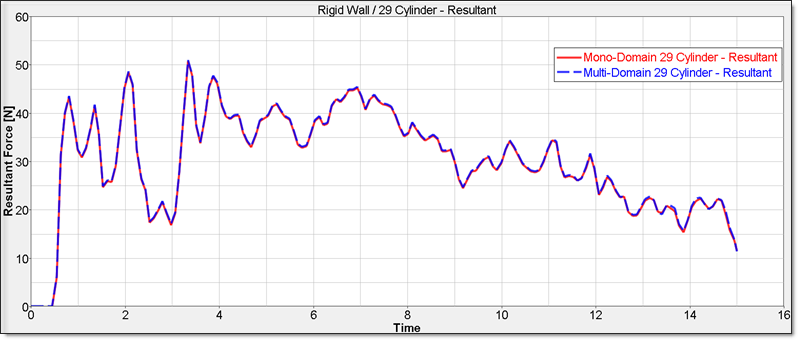
図 6. 2つのテストのインパクター力
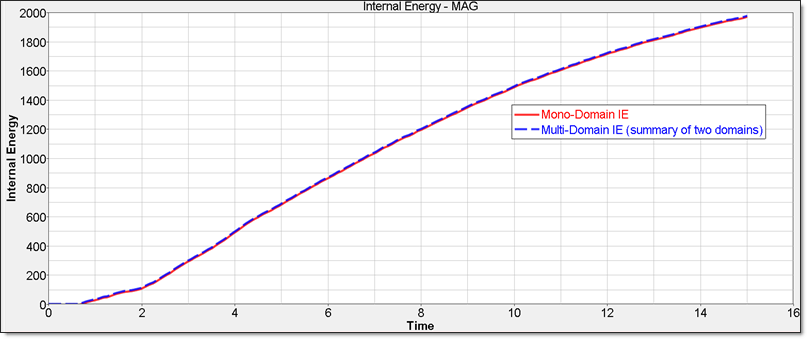
図 7. 2つのテストの内部エネルギー
マルチドメインを用いる時、そのパフォーマンスは、大きなモデルまたは細かいメッシュのパートがモデル全体の30%以下(今回の50%は多いです)の場合、より顕著になります。
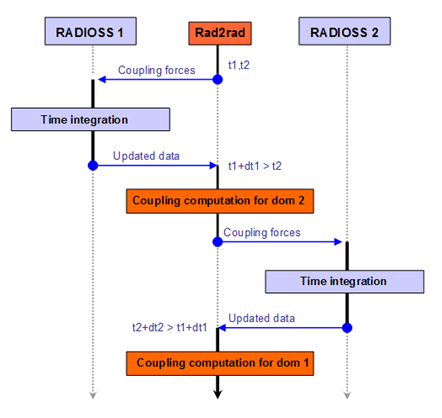
図 8. RAD2RADマルチ時間ステップ法
まとめ
マルチドメインアプローチを用いることにより、高い品質の結果を保ちながら計算時間を顕著に減少させることができます。
新しい単一入力ファイルフォーマットはマルチドメインを、前のバージョンのセットアッププロセスと比べて、よりユーザーフレンドリーにしています。