RD-E:1500 ギア
このスタディの目的は、ピッチ径が同じで互いに接触している2つの直歯ギアを使用して、2次インターフェース接触の使用方法を示すことです。2種類の接触インターフェースを比較します。
メッシュ化のために、20節点の3次元ソリッド要素と16節点のシェル要素の定式化を使用して、歯の曲率を表現します。一方のギアに一定の速度を適用します。これにより、それぞれのギアの中心軸を中心とした初期回転速度が両方のギアに適用されます。被駆動側ギアに組み込まれているトーションスプリングによって、この運動に対する抵抗力が発生します。
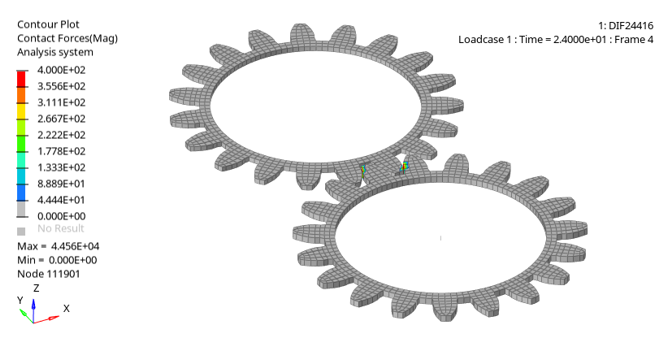
図 1.
図 1.
使用されるオプションとキーワード
- /BCS
- 節点グループに対して、並進運動と回転運動の境界条件を定義します。
- /BRICK20
- 3Dソリッド要素(20節点3次元ソリッド要素)を記述します。
- /IMPVEL
- 節点グループに対する強制速度を設定します。
- /INIVEL/AXIS
- 指定した座標系で節点グループの並進速度と回転速度の両方を初期化します。
- /INTER/TYPE16
- 3次元ソリッドの外部サーフェスと節点間の衝突をシミュレートします。
- /INTER/TYPE17
- 2つの3次元ソリッドグループの外部サーフェスどうしの衝突をシミュレートします。
- /SHEL16
- 3Dシェル要素(16節点厚肉シェル要素)を記述します。
注: HyperMeshでは/SHEL16要素がサポートされていません。HyperCrashを使用して入力ファイルを確認してください。
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
モデル概要
ギアシステムは一定加速度(= 2.0e-6 rad/ms2)で回転します。
一方のギアに加速度を適用します。歯の間の接触では摩擦は生成しないと仮定します。
スチールの特性 (弾性/MAT/LAW2) は:
- 材料特性
- 値
- ヤング率
- 210000
- 密度
- 7.8x10-03 g/mm3
- ポアソン比
- 0.29
- 歯の数
- Z =19
- 直径のピッチ
- P = 1/mo= 1/40
- 圧力角度
- ao= 20 degrees
以下のパラメーターが次のように計算されます:
- パラメータ
- 値
- ピッチ径
- Dp = mo* Z、これでDp = 760 mm
- 根の直径
- Db = mo* cos(ao)、これでDb = 714.17 mm
- 歯先
- ha = mo、これでha = 40 mm
- 歯元
- hf = 1.25 * mo、これでhf = 50 mm
- 円のピッチ
- p = PI * mo、これでp = 125.66 mm
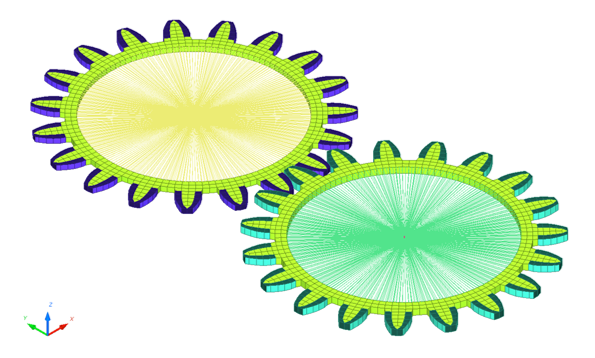
図 2. メッシュの全体図
一定加速度を与えるため、一定の初期回転フェーズで初期値の影響を減らし、時刻に開始します。更に、回転加速度が2.0E-6 rad/ms2になるように、一方のギアに強制速度が与えられます。ばねを使用して一定の抵抗運動量を作成し、その力を2つ目のギアの剛体に適用します。
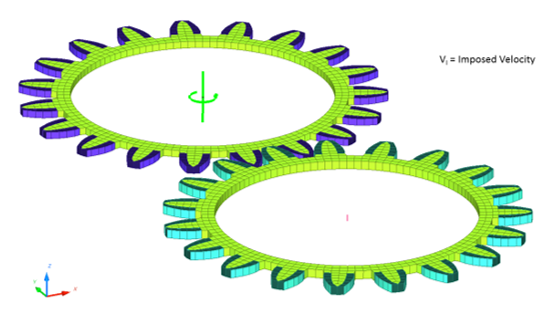
図 3. 剛体のメイン節点を通して与えられる強制速度
図 3. 剛体のメイン節点を通して与えられる強制速度
16節点の厚肉シェル要素(SHEL16)と20節点のソリッド要素(/BRICK20)を用いてギアをモデル化します。2次ソリッドメッシュが歯の曲率を表現するために用いられています。接触インターフェイスTYPE16とTYPE17は、16節点の厚肉シェル要素の2次曲面間の接触を管理するために使用されます。
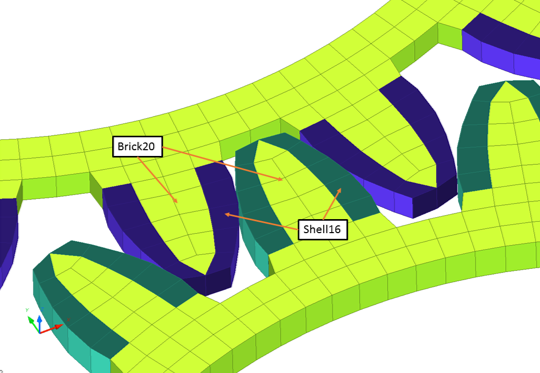
図 4. 歯の図
図 4. 歯の図
接触インターフェース TYPE16とTYPE17は、Lagrange Multiplierの運動条件を使用しています。これらの運動条件は、他のLagrange乗数運動条件とのみ適合性があります。このインターフェース定式化は、SPMD並列バージョンとの適合性がありません。そのため、多くのCPUを必要とする大規模なシミュレーションでは、これらの接触インターフェースは役に立ちません。/INTER/LAGMUL/TYPE16 インターフェースは、節点とソリッドの外部サーフェス間の衝撃をシミュレートします。外部サーフェスは、16節点厚肉シェル要素、20節点3次元ソリッド要素、8節点3次元ソリッド要素、または8節点厚肉シェル要素のいずれかが可能です。/INTER/LAGMUL/TYPE17インターフェースは、2つのソリッドの外部サーフェス間の衝撃をシミュレートします。外部サーフェスには16点厚肉シェル(/SHEL16)要素のみが可能です。このインターフェースでは、Lagrange乗数条件が使用されます。
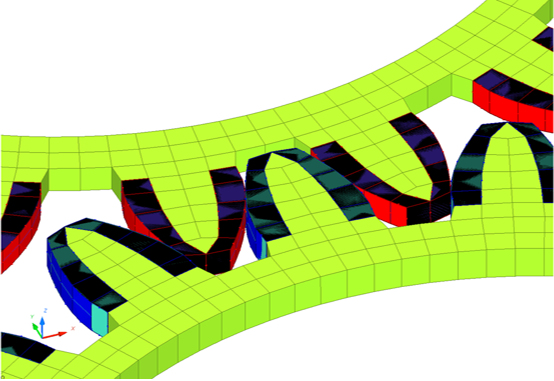
図 5. 2次サーフェスの間の接触のモデル化(TYPE16/17インターフェース)
図 5. 2次サーフェスの間の接触のモデル化(TYPE16/17インターフェース)
結果
時刻歴結果
図 6 はギアに作用した速度を示します。
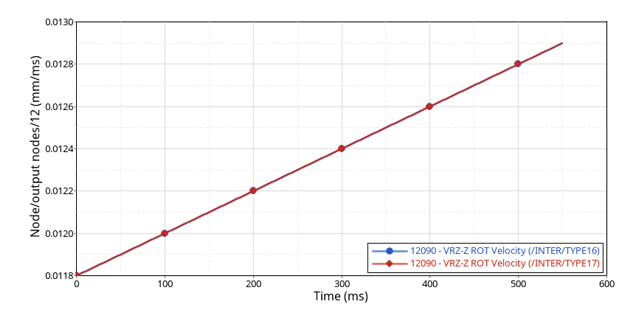
図 6. 強制回転速度曲線
図 6. 強制回転速度曲線
まとめ
どちらのインターフェースも、接触面が複雑でギャップがない場合の種類の適用に対して、全体として満足な結果をもたらしています。これらの接触はLagrange 乗数の運動条件を使用しているため、ハイブリッドやSPMDの並列化に比べて少ないCPUに制限されるSMPの並列化でのみ動作します。大規模モデルの場合、接触ギャップのないソリッド要素には、ペナルティ法を用いた接触のTYPE24とTYPE25が有効です。