Response Variables can be removed from the study by
deleting them from the wizard.
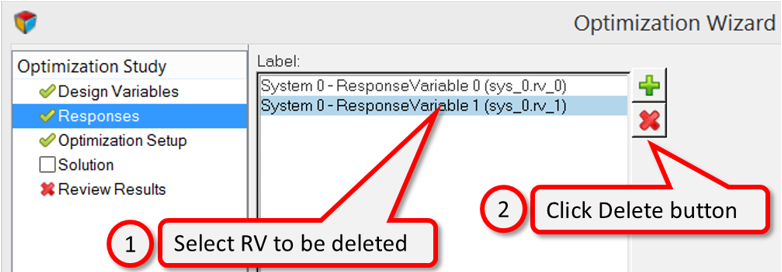
To delete a Response Variable, select the desired RV from the list and click
the Delete button.
Figure 1.
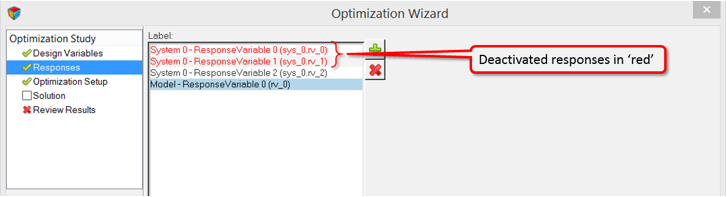
Tip: Responses can also be deleted outside the wizard by
right-clicking on the RV in the Project Browser and
choosing Deactivate > Selected Objects(s).
Such RVs will be highlighted in ‘red’ in the wizard and
will not be considered for the optimization study. Figure 2.