Review and Transform Source Data
When source data is not in the correct location and overlaps with the target model, the tools provided in the Field Realization dialog can be used to transform the source model to the target model's location with linear transformation, rotation, or scale methods.
-
Create and define a field entity:
-
In the Entity Editor, define the source model
data (results, csv, and current model).
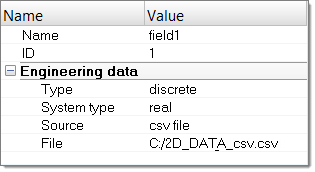
Figure 1.
-
In the Entity Editor, define the source model
data (results, csv, and current model).
-
Realize the field:
-
In the Field Realization dialog, define the
realization settings.
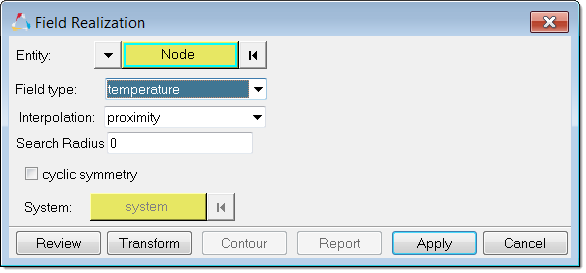
Figure 2.
-
In the Field Realization dialog, define the
realization settings.
-
In the Field Realization dialog, click
Review to display the target model (green) and the
source model (pink).
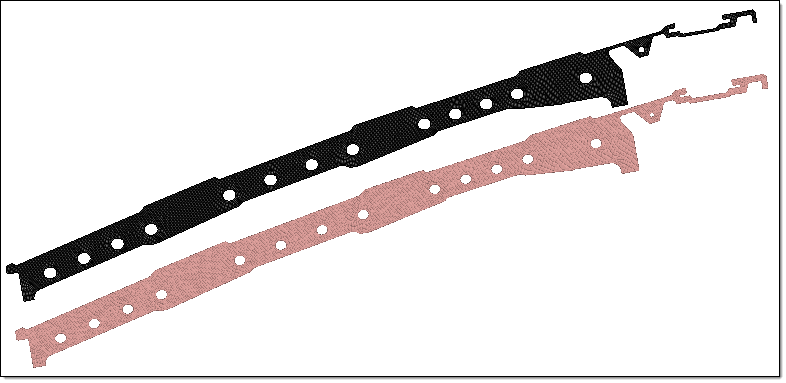
Figure 3. -
Transform the source data:
-
In the Field Realization dialog, click the
Transform button.
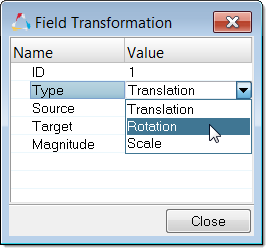
Figure 4.
Note: Manually define the vector direction by entering the Source node x,y,z location, Target node x,y,z location, and Magnitude of the vector. -
In the Field Realization dialog, click the
Transform button.