座標系と出力リクエスト
Tydex-C Axis座標系
“C”はホイール中心です。C-Axis座標系は以下の特性を有します:- C-Axis座標系の原点はホイール中心です。
- X軸はホイール面内にあり、接地平面と平行で、進行方向を指します。
- Y軸はホイール面と垂直で、車両の左側方向を指します。したがって、ホイールとタイヤのY軸周りの正方向回転は、タイヤを前方に回転させます。
- Z軸はホイール面内にあり、傾斜角度によって鉛直方向とは異なり、X軸とY軸に垂直です(Z = X x Y)。
Tydex-W Axis座標系
“W”はホイールです。Tydex-W Axis座標系は、路面が平坦と仮定せず、タイヤが路面と接触する位置の路面の局所傾斜を考慮します。Tydex-W Axis座標系は以下の特性を有します:- W Axis座標系の原点はホイール面と局所路面との理想の接触ポイント上に位置します。これは、Tydex C座標系のZ軸と局所路面との交差部分です。
- X軸は、ホイール面と局所路面との交差のライン方向を指します。
- Z軸は局所路面の法線と平行で、したがって、局所路面と垂直です。
- Y軸は、ホイールの回転軸(Tydex C-Axis座標系のY軸)の局所路面への投影です。Y軸は、X軸とZ軸の両方に垂直です(Y = Z x X)。
SAE座標系
- X軸は前方が正方向です。
- Y軸は右が正方向です。
- Z軸は下が正方向です。
MotionViewを使用して構築したモデルには、該当するタイヤに固有の多くの出力リクエストが自動的に追加されています。次のブラウザ画像では、これらの出力の例を示しています:
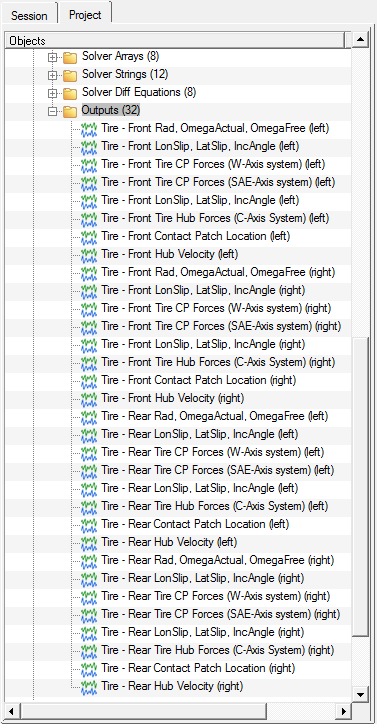 図 1.
図 1.
図 1. 次の表では、結果がHyperGraphにどのように表示されるかがx、y、z、r1、r2、およびr3に示されています。
- タイヤの転がり状態
- (ブランチID 1)
-
成分 名前 単位 x 転がり半径 モデルの単位 y 角速度 ラジアン/秒 z 自由角速度 ラジアン/秒 - TYDEX-W(ISO)軸座標系内のタイヤのキネマティック特性
- (ブランチID 2)
-
成分 名前 単位 x 縦方向のスリップ % y 横方向のスリップ角度 ラジアン z 傾斜角度 ラジアン - TYDEX-W(ISO)軸座標系内のタイヤの接触パッチ力
- (ブランチID 3)
-
成分 名前 単位 x 縦力 モデルの単位 y 横力 モデルの単位 z 垂直力 モデルの単位 r1 残留転倒モーメント モデルの単位 r2 転がり抵抗モーメント モデルの単位 r3 アライニングモーメント モデルの単位 - SAE軸座標系内のタイヤの接触パッチ力
- (ブランチID 4)
-
成分 名前 単位 x 縦力 モデルの単位 y 横力 モデルの単位 z 垂直力 モデルの単位 r1 残留転倒モーメント モデルの単位 r2 転がり抵抗モーメント モデルの単位 r3 アライニングモーメント モデルの単位 - SAE軸座標系内のタイヤのキネマティック特性
- (ブランチID 5)
-
成分 名前 単位 x 縦方向のスリップ % y 横方向のスリップ角度 ラジアン z 傾斜角度 ラジアン - TYDEX-C軸座標系内のハム音発生時のタイヤ力
- (ブランチID 6)
-
成分 名前 単位 x 縦力 モデルの単位 y 横力 モデルの単位 z 垂直力 モデルの単位 r1 残留転倒モーメント モデルの単位 r2 転がり抵抗モーメント モデルの単位 r3 アライニングモーメント モデルの単位 - GFORCE rmマーカー内のタイヤの面に沿った接触パッチ位置
- (ブランチID 10)
-
成分 名前 単位 x 路面接触ポイントのxの位置 モデルの単位 y 路面接触ポイントのyの位置 モデルの単位 z 路面接触ポイントのzの位置 モデルの単位 r1 路面へのタイヤの径方向貫通 モデルの単位 - GFORCE rmマーカー内のタイヤのハブ速度
- (ブランチID 11)
-
成分 名前 単位 x リムの中心の速度(縦方向) モデルの単位 y n/a n/a z リムの中心の速度(路面法線に沿った垂直方向) モデルの単位
MotionSolve入力デックに置かれた出力リクエストの例を以下に示します。
<Post_Request
id = "70000063"
comment = "Tire - Front Rad, OmegaActual, OmegaFree (left)"
type = "USERSUB"
usrsub_param_string = "USER(902,1,11001)"
usrsub_dll_name = "mbdtire.dll"
usrsub_fnc_name = "tireReq"
/>