データセット
Vehicle Parameters
一部のドライバーコントローラー(フィードフォワードコントローラー、ギアシフトコントローラー)は、車両情報を必要とします。この情報は、データセットを使って提供され得ます。これらのコントローラーが使用されていない場合、このデータセットは取り込む必要がありません。グラフィカルユーザーインターフェースは自動的にこれらのデータセットを入力します。
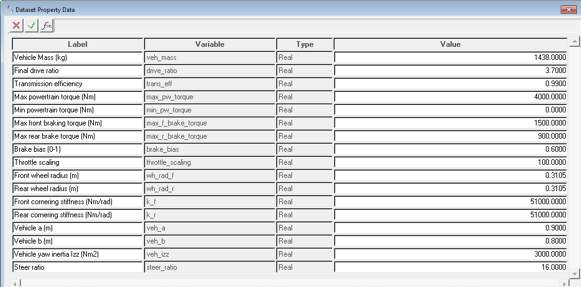
図 1.
図 1.
| パラメータ | タイプ | 範囲 | 説明 |
|---|---|---|---|
| Vehicle Mass | 実数 | Value>0 | |
| Final drive ratio | 実数 | Value>0 | ドライブカプラーアウトプットおよびインプットシャフト間のカプラー比。デフォルトRWDモデルの場合、駆動比は3.7、デフォルトFWDモデルの場合、駆動比は1。この値はパラメータ化されていません。 |
| Transmission efficiency | Real | Value>0 | 入力角速度 / (出力角速度*駆動比) |
| Drive type | オプション | Value = FWD または RWD | Advanced Driverには四輪駆動は許可されない。 |
| Max. powertrain torque | 実数 | Value>0 | 100%スロットルでの差動インプットシャフトにおけるパワートレインにより生成されるトルク。 *CSEパワートレインを有さない車両モデルにのみ必要。Driverは直接CSEパワートレインをクエリ可能。 |
| Min. Powertrain torque | 実数 | 0%スロットルでの差動インプットシャフトにおけるパワートレインにより生成されるトルク。 *CSEパワートレインを有さない車両モデルにのみ必要。Driverは直接CSEパワートレインをクエリ可能。 |
|
| Maximum front braking torque | 実数 | Value>0 | 100におけるフロントアクスル上の最大ブレーキトルク。 |
| Maximum rear braking torque | 実数 | Value>0 | リアアクスル上の最大ブレーキトルク。 |
| Brake bias | 実数 | 0<Value<1 | フロントからリアへ。0は100%フロント、1は100%リア。 |
| Front wheel radius | 実数 | Value>0 | 載荷タイヤ半径 |
| Rear wheel radius | 実数 | Value>0 | 載荷タイヤ半径 |
| Front cornering stiffness | 実数 | Value>0 | |
| Rear cornering stiffness | 実数 | Value>0 | |
| Vehicle a | 実数 | Value>0 | 車両のフロントアクスルから車両の重心までの距離のX成分(Vehicle SAEシステム)。 |
| Vehicle b | 実数 | Value>0 | (ホイールベース - vehicle a) |
| Vehicle yaw inertia | 実数 | Value>0 | |
| Steer ratio | 実数 | Value>0 | ステアリングホイール入力のタイヤモーション(トー)に対する比 |
Analysis Settings
このデータセットが唯一含む情報は、Altair Driverファイルのアドレスです。
| パラメータ | タイプ | 範囲 | 説明 |
|---|---|---|---|
| Altair Driverファイル | File | ファイルパスのアドレス |
Signal Dimensions
Signal Dimensionsデータセットは、ラベル、ID、および終了信号の大きさといった情報をDriverに渡すために必要です。
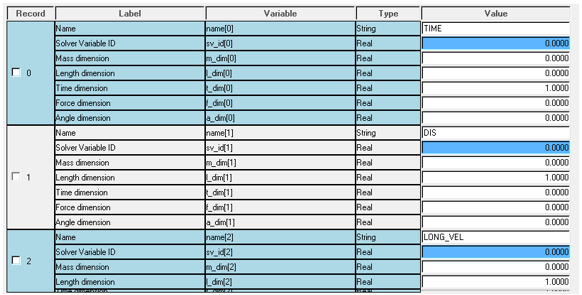
図 2.
図 2.
使用例:
$Example ADF end conditions block
(END_CONDITIONS)
{SIGNAL GROUP ABS OPERATOR VALUE TOLERANCE WATCH_TIME}
LONG_VEL 0 Y SS 0.0 0.0001 1.50
ROLL_ANGLE 1 Y SS 0.0 0.0001 1.50
PITCH_ANGLE 2 Y SS 0.0 0.0001 1.50
YAW_RATE 3 Y SS 0.0 0.0001 1.50
CG_Z 4 Y SS 0.0 0.0001 1.50
$------------------------------------------------------------------------------------------------------------------ADFおよびSignal Dimensionsデータセットでこのブロックを使用することにより、Driverは各値について適切な変換係数を知ることができます。
Control States
Scripted DriverはCSEアーキテクチャー上で機能します。CSEアーキテクチャー用のグラフィカルユーザーインターフェースはサポートされていないため、変更を行うには、MDLステートメントを変える必要があります。
| MDLステートメント | |
|---|---|
|
|
| gse_advanced_driver | Driver CSEの変数名 |
| “CSE Advanced Driver” | ラベル |
| 6 | 出力数 |
| sa_u_advanced_driver | 入力信号を含むソルバー配列 |
| Driverは状態配列をサイズ変更し、状態の初期条件を内部的に設定します。したがって、状態のIC配列は、与えてはいけません。 | |
|
|
| USER | MotionSolveがエントリポイントについてDLLの外を探す必要があることを示します。 |
| USER({sa_par.idstring}) | 車両パラメータの入ったpar[0] = Array IDを含む関数コール |
|
|
| 1 | 状態の数はデフォルトで1に設定されています。 |
|
|
| Msautoutils | このDLLを先に現在のディレクトリで探してから、MotionSolveのインストール環境で探します。 |
|
|
| SCRIPT_DRIVER | エントリポイント関数名 |
Motions
| Steering Wheel Motion | Driverは、必要なステアリング角度を計算し、ステアリングホイールジョイントに強制運動を適用します。 |
| Differential motion | 静的シミュレーションでディファレンシャルギアをロックするために必要です(駆動ジョイントアタッチメントをDriver attachmentダイアログで解く場合にのみ表示されます)。 |
Forces
| Steering torque | Driverは、必要なステアリングトルクを計算し、ステアリングホイールジョイントにトルクを適用します。 |
Sensor
| Maneuver switch | 1つの運転操作を終えて次の運転操作を開始するためのスイッチ。Sensorは、センサーサブルーチンを使って、スイッチを作動させる信号に関係した信号と終了条件を監視します。 |
Solver Arrays
これらのソルバー配列は、データセットまたはアタッチメントにパラメータ化され、いくつかの車両情報をソルバーに提供します。
これらを入力 / 編集する必要はありません。
| Mass Info Array |
|
| Brake Info Array |
|
| Tire Info Array |
|
| Powertrain Info Array |
|
| Drive Train Info Array |
|
| Driver Info |
|
| Bicycle Model Info Array |
|
| Vehicle Parameters Array |
|
| Sensor Mass Dimension array(Signal Dimensionsデータセットテーブルを使用) |
|
| Sensor Length Dimension array(Signal Dimensionsデータセットテーブルを使用) |
|
| Sensor Time Dimension array(Signal Dimensionsデータセットテーブルを使用) |
|
| Sensor Force Dimension array(Signal dimensionsデータセットテーブルを使用) |
|
| Sensor Angle Dimension array(Signal Dimensionsデータセットテーブルを使用) |
|
| Sensor Label Dimension array(Signal Dimensionsデータセットテーブルを使用) |
|
| Sensor Solver variable ID array(Signal Dimensionsデータセットテーブルを使用) |
|
| Sensor Master array(Signal Dimensionsデータセットテーブルを使用) |
|
| Input Signal Array(GSE、Uタイプ) |
|
| Motion array |
|
| Force array |
|
| Joint array |
|
| Jprim array |
|
| Sensor array |
|
| Output Signal array |
|
| Solver Diff array |
|
| Control Entities Array |
|
Solver Diff
| Steering angle differentiation | `ARYVAL({gse_msautoDriver_1.y_array.idstring},1)` |
| Throttle | `ARYVAL({gse_msautoDriver_1.y_array.idstring},2)` |
Solver Variables
| Driverステア出力 | `ARYVAL({gse_msautoDriver_1.y_array.idstring},1)` |
| Driverスロットル出力 | `ARYVAL({gse_msautoDriver_1.y_array.idstring},2)` |
| Driverブレーキ出力 | `ARYVAL({gse_msautoDriver_1.y_array.idstring},3)` |
| Driverギア出力 | `ARYVAL({gse_msautoDriver_1.y_array.idstring},4)` |
| Driverクラッチ出力 | `ARYVAL({gse_msautoDriver_1.y_array.idstring},5)` |
| 移動距離 | `ARYVAL({gse_msautoDriver_1.y_array.idstring},6)` |
| 要求トラクション信号 | `ARYVAL({gse_msautoDriver_1.y_array.idstring},8)` |
| ステアトルク | `ARYVAL({gse_msautoDriver_1.y_array.idstring},9)` |
| シミュレーション時間 | TIME |
| エンジン回転数 | `VARVAL(<Engine speed attachment solver variable>)` |
| Longitudinal velocity wrt to gyro | -VX ( <Gyro fixed marker> , <Ground body CM marker> , < Gyro fixed marker > ) |
| Lateral velocity wrt gyro | VY ( <Gyro fixed marker> , <Ground body CM marker> , < Gyro fixed marker > ) |
| Yaw rate wrt gyro | WZ ( <Gyro fixed marker> , <Ground body CM marker> , < Gyro fixed marker > ) |
| Longitudinal acceleration wrt gyro | -ACCX( <Gyro fixed marker> , <Ground body CM marker> , < Gyro fixed marker > ) |
| Lateral acceleration wrt gyro | -ACCY( <Gyro fixed marker> , <Ground body CM marker> , < Gyro fixed marker > ) |
| Longitudinal displacement | DX ( <Vehicle Body>) |
| Lateral displacement | DY ( <Vehicle Body>) |
| 垂直変位 | DZ ( <Vehicle Body>) |
| ヨー角 | AZ(<Vehicle Body>) |
| Roll Angle | ROLL(<Vehicle Body>) |
| Pitch Angle | PITCH(<Vehicle Body>) |
| Roll Rate | WX(<Vehicle Body>, <Ground Body>, <Vehicle Body>) |
| Pitch Rate | WY(<Vehicle Body>, <Ground Body>, <Vehicle Body>) |
| ユーザー信号0 | Altair Driverパネルで定義されたユーザー(signal_0) |
| ユーザー信号1 | Altair Driverパネルで定義されたユーザー(signal_1) |
| ユーザー信号2 | Altair Driverパネルで定義されたユーザー(signal_2) |
| ユーザー信号3 | Altair Driverパネルで定義されたユーザー(signal_3) |
| ユーザー信号4 | Altair Driverパネルで定義されたユーザー(signal_4) |
| ステリングホイール誤差導関数 | DIF1(<Steering angle solver diff>)' |
| 車両でのステアリングホイール角 | -AZ(<Steering wheel joint i body>,<Steering wheel joint j body>)` |
| 要求トラクション信号導関数 | DIF1(<Demand traction signal solver diff>)` |
Template
Driverの駆動ジョイントアタッチメントが解決されていない場合にディファレンシャルロックモーションを導入します。
{ driveJt = {PARENT.ds_vehicle_params.int_jdrive_ID.value} }
{if (driveJt != 0 )}
<Motion_Joint
id = "{abs( id - driveJt + 1)}"
label = "Differential motion"
full_label = "Model-Altair Driver-Differential motion"
type = "CONSTANT"
val_type = "D"
q = "0."
joint_id = "{PARENT.ds_vehicle_params.int_jdrive_ID.value}"
motion_type = "R"
/>1
{endif}
注: ソルバーでのDriverのエントリポイントに対するCONSUB (“RUN_STANDARD_CAR_MODEL”)は、Driverでサポートされるフルビークル解析 / イベントのそれぞれに移動します。
Sensors
| Maneuver switch | 1つの運転操作を終えて次の運転操作を開始するためのスイッチ。Sensorは、センサーサブルーチンを使って、スイッチを作動させる信号に関係した信号と終了条件を監視します。 |
システムジャイロスコープ
ジャイロスコープは、Driver入力について縦揺れ / 横揺れ修正速度および変位の計算に使用されます。
| Gyro body | 車両ボディと結合を成すボディ |
| Gyro body CG to gyro X dis CG to gyro Y dis CG to gyro Z dis |
ジャイロスコープの位置情報を含んだデータセット ジャイロスコープ X – 車両重心 X ジャイロスコープ Y – 車両重心 Y ジャイロスコープ Z – 車両重心 Z |
| Gyro parallel axes joint Gyro hookes joint |
グラウンドボディとジャイロスコープボディ間の並行軸ジョイント。全体Z方向をジャイロスコープ重心Z軸に揃えます。 ジャイロスコープX方向およびジャイロスコープY方向のクロスピンを、ユニバーサルジョイントを使って、車両X方向および車両Y方向に揃えます。 |
| Gyro fixed marker | ジャイロスコープボディに固定されたマーカー |
| Gyro location | ジャイロスコープボディの重心位置。 |