Markers
Markersツールを使用して座標系と参照フレームを作成します。
マーカーエンティティは、MotionViewにおける直交右手座標系および参照フレームです。マーカーはボディに属する必要があります。所属先のボディは、剛体、弾性体、質点のいずれのタイプでもかまいません。グローバル原点にあるグラウンドボディ(ニュートン参照フレーム)に属するデフォルトのマーカーをグローバルフレームと呼びます。
マーカーを定義するために必要なトポロジ情報を以下の図に示します。
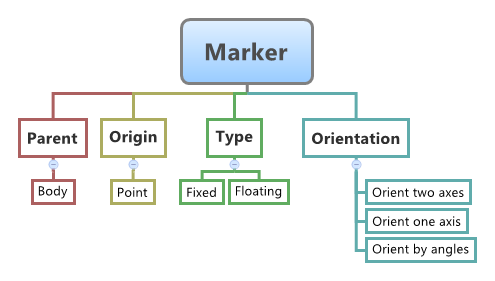
図 1.
- ノンフローティング(シングルまたはペア)
- フローティング(シングルまたはペア)
ボディに属する固定マーカーは、そのボディの参照フレームを基準として固定されます。マーカーをボディに結合するには、位置と方向を指定する必要があります。
フローティングマーカーは、ボディに属していても、そのボディの参照フレーム内に固定されることはありません。フローティングマーカーは通常、ベクトル、フォース、ブッシュなどのエンティティで使用されます。
マーカーは、マルチボディシステムにおける主要エンティティの1つです。マルチボディシステムを構成するエンティティはすべて、ソルバーでマーカーを使用して表されます。例えば、CGマーカーは、指定されたマーカー位置にあるボディを表し、質量はCGマーカーの原点に位置すると見なされます。回転ジョイントは、2つのマーカー(IマーカーとJマーカー)の間で5つの方向に拘束を強制することによって表されます。これらのマーカーが2つのボディ上にあり、それらの間でジョイントが定義されます。フォースなどその他のエンティティについても、同様の概念があります。ベクトル、フォース、ブッシュなどのエンティティでは、JマーカーをIマーカーと一致させる必要があります。Jマーカーはそのボディ参照フレームを基準として移動する必要があるため、このようなマーカーはフローティングマーカーとして定義されます。
ボディ、ジョイント、フォースなどのエンティティをMotionViewで定義する場合、マーカーは暗黙的に作成されます。ただし、マーカーを明示的に作成する必要がある場合もあります。例えば、他のエンティティがない特定の位置に出力を定義する場合や、フォースの参照フレームを定義する場合です。
マーカーの作成
マーカーは、ジョイント、フォース、運動、出力要求などの他のエンティティの参照として使用される、ボディに付加される座標系です。
-
ボディ参照を選択します。
- モデリングウィンドウでボディを選択します。
- ガイドバーで、Advanced
Selector
 をクリックし、 モデルツリーで選択します。
をクリックし、 モデルツリーで選択します。
-
原点参照を選択します。
- モデリングウィンドウでポイントを選択します。
- ガイドバーで、Advanced
Selector をクリックし、 モデルツリーで選択します。
- オプション:
 をクリックすると、エンティティの選択をリセットし、新しいエンティティを選択することができます。
をクリックすると、エンティティの選択をリセットし、新しいエンティティを選択することができます。
-
リファレンス選択が完了したら、以下のいずれかの方法でマーカーを作成します。
- ガイドバーの
 をクリックすると、エンティティが作成され、方向が決まります。
をクリックすると、エンティティが作成され、方向が決まります。 - モデリングウィンドウのマウス位置に表示される
 ボタンをクリックします。
ボタンをクリックします。  をクリックしてエンティティを作成し、このマーカーの選択を終了します。
をクリックしてエンティティを作成し、このマーカーの選択を終了します。
マーカーをモデルに追加すると、ブラウザ領域にそのマーカーが自動的に表示されます。注: デフォルトで、MotionView内のエンティティの変数名は特定の規則に従います。例えば、すべてのマーカーエンティティの変数名は“m_”で始まります。これは、でモデルを構築する場合に従う推奨規則であり、モデル編集やモデル操作において様々なメリットが得られます。 - ガイドバーの
マーカーの編集
関連付けられたボディの指定と原点の指定のほか、マーカーを定義するための軸のルールを指定する必要があります。