静的ライド解析
静的ライド解析は、ハンドルを固定した状態における、両方のホイールの同相の上下移動のシミュレーションです。シャシーは地面に固定されます。ホイール中心の変位は、ユーザーによって指定されます。サスペンションは、単純な制御システムと、“サスペンションテストリグ”を介して動きます。ホイールは、面内ジョイントを使用して、タイヤパッチ位置でサスペンションテストリグに対して拘束されます。標準のサスペンションリクエスト(キャスター、キャンパー、トーなど)は、ライド解析の一部として含まれており、ここではこのリクエストについて説明します。サスペンションのライド解析はフロントおよびリアで同様です。
静的ライド解析は、車両の前半分および後ろ半分についてMotionViewのAssembly Wizardで構築したモデルで動作するように設計されています。この解析は、Task Wizardを使用して追加すると自動的にモデルに付加されます。解析のアタッチメント方式が厳密に順守されていれば、手動で構築したモデルで解析を使用できます。
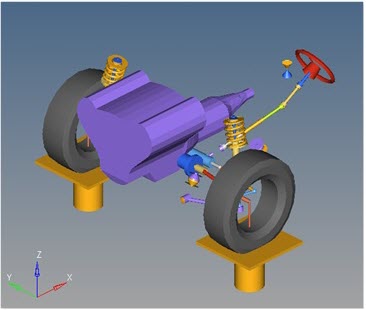
図 1. フロントサスペンションの静的ライド解析
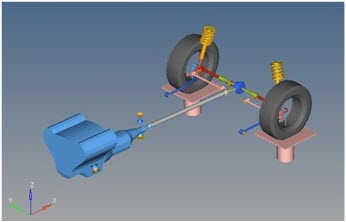
図 2. リアサスペンションの静的ライド解析
図 1. フロントサスペンションの静的ライド解析
図 2. リアサスペンションの静的ライド解析
解析はゼロ変位(設計位置)で開始されます。
- 時間(秒単位)
- 動作
- 0~2.5
- ホイールが設計位置からジャウンス位置に移動します。
- 2.5~5.0
- ホイールがジャウンス位置から設計位置に移動します。
- 5.0~7.5
- ホイールが設計位置からリバウンド位置に移動します。
- 7.5~10.0
- ホイールがリバウンド位置から設計位置に移動します。
- 10.0
- 解析が終了します。
サスペンションのストロークは、解析のStatic Ride Parametersフォームに入力されます。ストロークは、対称的であると見なされます。サスペンションの変位は、単調和関数(正弦波)パターンに従います。
すべてのサスペンション設計係数(SDF)を含む、合計47の出力が計算されます。SDFの入力データは、静的ライド解析のVehicle Parametersフォームに入力します。
解析の仕組み
静的ライド解析は、ホイールを同相で移動させることによるサスペンションの垂直変位の解析です。これを実行するメカニズムを以下に説明します。
- ジャッキボディは解析に含まれます。
- ジャッキボディは並進ジョイントによって地面に拘束され、ジャッキボディが垂直方向にのみ移動できるようになっています。
- Inplaneジョイントは、Vehicle Parametersフォームで入力されたSLRの位置で、ジャッキをホイールに拘束します。
- ソルバー変数Left Command VariableとRight Command Variableでは、ジャッキボディで目的とする変位を定義します。
- ソルバー変数Left Feedback VariableとRight Feedback Variableでは、ホイール上のホイール中心点と、地面上のホイール中心点の間のZ方向距離を計測します。
- ソルバー微分方程式diff left jackとdiff right jackは、Feedback変数とCommand変数の差として定義します。IFステートメントとMODE関数を使用して、静解析および擬似静解析ではソルバー微分方程式をオンにします。それ以外の解析モード(運動学解析、初期条件解析、動解析、および線形解析)では、ゼロに設定します(ソルバー微分方程式をオフに設定)。
- 式を使用して、フォースJack Vertical Actuatorがソルバー微分方程式diff left jackのDIF(値)になるように定義します。
Jack Vertical Actuatorフォースによって、ジャウンスとリバウンドの間でサスペンションが移動します。このフォースの大きさは、Differential Controllerの値で定義します。
注: control diff(単純な制御システム)は、次の2つの理由で使用されます。
- 制御システムおよびテスト装置のメカニズムは、サスペンションに拘束を追加しません。これにより、サスペンション設計係数の計算で使用する、ホイール中心のコンプライアンスマトリックスの計算が容易になります。
- テスト装置“Jack”にフォースが適用され、指定されたモーションによってホイール中心が垂直(Z)変位の範囲で移動します。このタイプのシステムでは、制御システムが必要です。