MV-3023:サスペンションの最適化
本チュートリアルでは、サスペンションモデルについてMotionSolveのOptimization Wizardを使って最適化問題をセットアップする方法について学習します。
- 設計変数としてのポイントの座標の定義
- カーブにマッチングさせるための応答タイプ'Root Mean Square Deviation'を定義
- 目的関数としての応答の使用
- 最適化の実行とHyperGraphでの結果の比較
- 概要
- 本チュートリアルでは、MV-3010(MotionView - HyperStudyを用いた最適化)でのサスペンションの最適化問題を引継ぎます。内側のタイロッドボールジョイントと外側のタイロッドボールジョイントの位置(yおよびz座標)を、トー角vs.ライド高さのカーブが希望する設計にマッチングするよう変化させます。
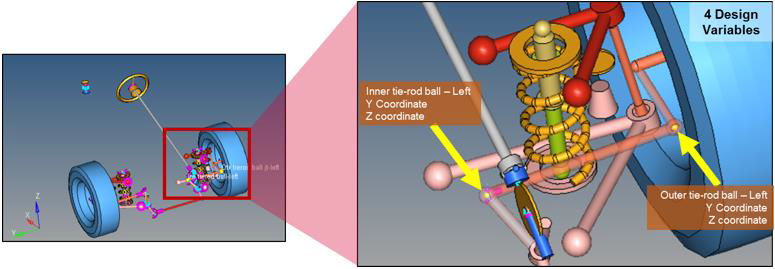
図 1. 最適化するサスペンションのトポロジー
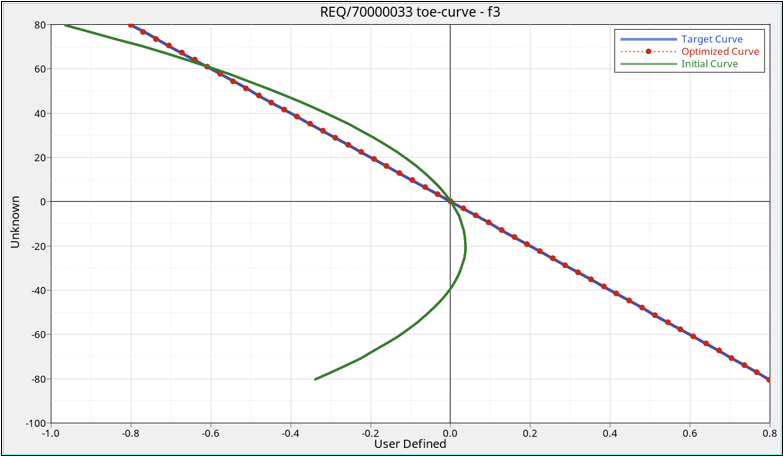
図 2. 初期設計、最適化された設計およびターゲット設計の‘トー-ライド高さ’のカーブ
設計変数の追加
このステップでは、最適化のための設計変数を追加します。
開始に先立ち、mbd_modeling\motionsolve\optimization\MV-3023にあるファイルmv_3023_initial_susp_opt.mdlおよびtarget_toe.csvを自身の<作業ディレクトリ>にコピーします。
-
内側のタイロッドボールジョイントおよび外側のタイロッドボールジョイントのy座標とz座標を設計変数とします。
-
設計変数の上限および下限を、表 1に従って変更します:
表 1. DV 下限値 上限値 Otr tierod ball jt(DV)-left-y -651.15 -551.15 Otr tierod ball jt(DV)-left-z 190.92 250.92 Inr tierod ball(DV)-left-y -298.9 -209.9 Inr tierod ball(DV)-left-z 230.86 278.86 設計変数の作成後、最適化ウィザードは以下のとおりに見えるはずでs;
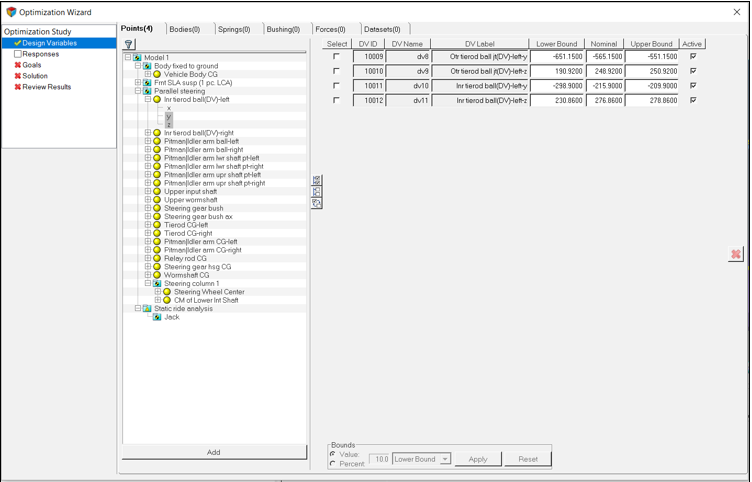
図 3.
-
設計変数の上限および下限を、表 1に従って変更します:
応答変数の追加
このステップでは、最適化のための応答変数を追加します。
-
 をクリックして、応答変数を追加します。デフォルトのラベルと識別子を保持し、OKをクリックします。
をクリックして、応答変数を追加します。デフォルトのラベルと識別子を保持し、OKをクリックします。
-
Response Expressionで、ライド高さの式を次のとおり入力します:
`(DZ({MODEL.sys_frnt_susp.b_wheel.l.cm.idstring})-282.57)`.これで、応答の作成が完了しました。ユーザーインターフェースは図 4のようになっているはずです。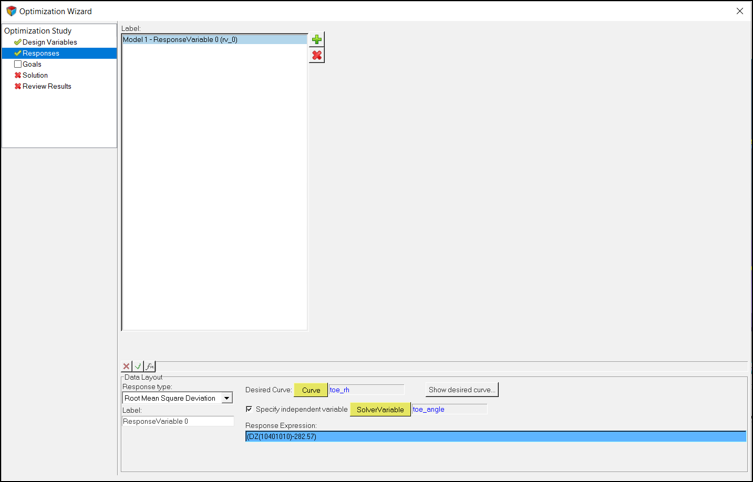
図 4.
目的関数と制約条件の追加
このステップでは、目的関数を問題に追加します。
Goalsページに進みます。Objectivesの下で、をクリックします。
これで、応答rv_0で目的関数が追加されます。この問題では、制約条件はありません。したがってこれで、モデルを実行する準備が整いました。
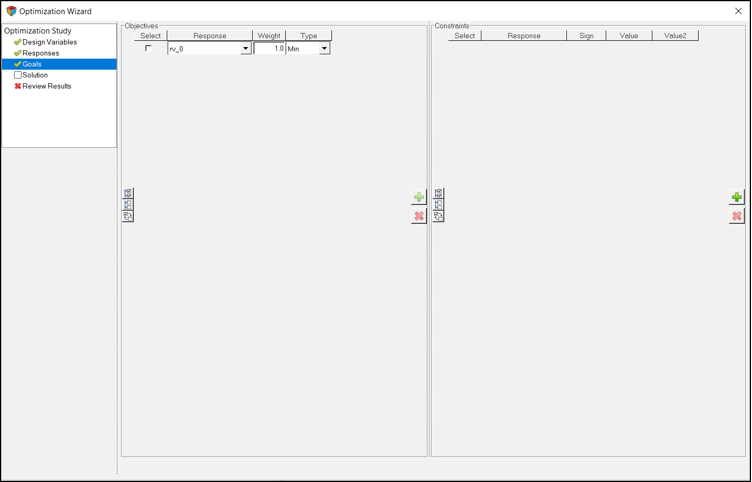
図 5. 目的関数の定義
図 5. 目的関数の定義
最適化の実行
このステップでは、最適化を実行します。
-
Save & Optimizeをクリックして最適化を実行します。
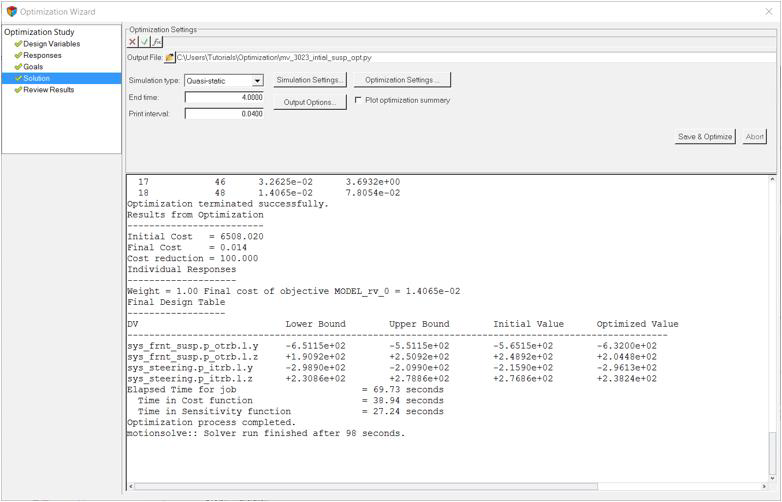
図 6. ソリューションのセットアップ
ポスト処理
このステップでは、最適化の結果をポスト処理します。
-
最適化プロセスが完了したら、Review Resultsページをクリックして結果を確認します。
サマリーは、図 7に示すように見えるはずです:
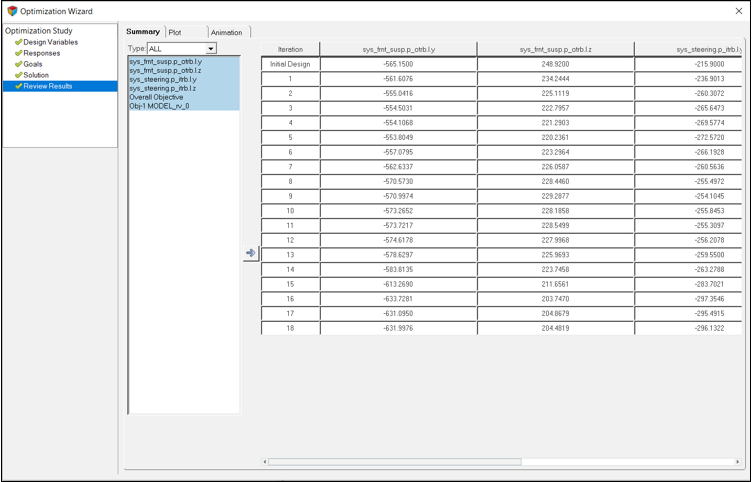
図 7.これより前のチュートリアルで説明したように、PlotページとAnimationページに進んでプロットとアニメーションを見ることも可能です。この最適化については、異なる反復計算でのトーvs.ライド高さのカーブをプロットし、ターゲットカーブにどれだけアプローチしているかを確認することに価値があります。 -
異なる反復計算でのトーvs.ライド高さのカーブをプロットし、ターゲットカーブにどれだけアプローチしているかを確認します。
-
Plotパネルで、XおよびYのType、Request、Componentを図 8に示すように変更します。

図 8. ターゲットカーブをプロットするための設定プロッティングウィンドウには直線が見られるはずです。
-
Plotパネルで、XおよびYのType、Request、Componentを図 8に示すように変更します。
-
XおよびYのType、Request、Componentを図 9に示すように変更します。

図 9. 初期設計をプロットするための設定 -
.mrfファイルをインポートし、同じ設定でカーブをプロットします。
最適化設定の'toe-ride height'カーブは、ターゲットカーブとオーバーラップします。
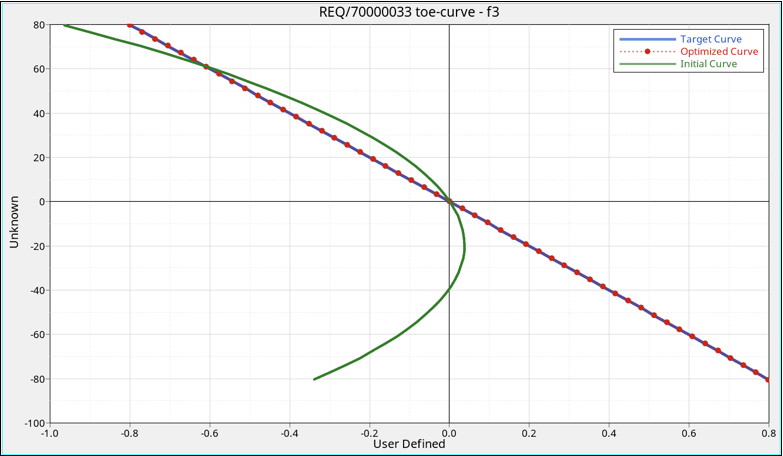
図 10.