/INTER/TYPE12
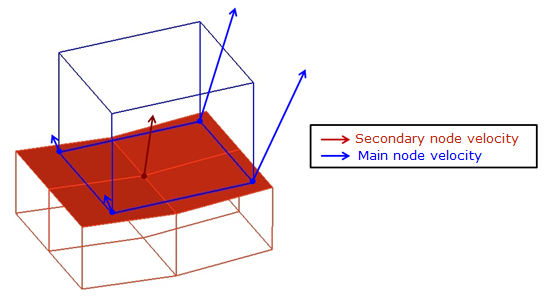
ブロックフォーマットのキーワード インターフェースTYPE12は流体と流体の接触を記述しており、2つのALEサーフェス(メイン側およびセカンダリ側)の間の流れの伝達を可能にします。セカンダリ節点の速度は、メインサーフェスの値から補間されます。その後、2つのサーフェス間で対流流束が計算されます。
内容
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE12/inter_ID | |||||||||
| inter_title | |||||||||
| surf_IDs | surf_IDm | Interpol | |||||||
| Tol | |||||||||
| ITIED | Bcopt | skew_ID | node_ID | ||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| inter_ID | インターフェースの識別子 (整数、最大10桁) |
|
| inter_title | インターフェースのタイトル (文字、最大100文字) |
|
| surf_IDs | セカンダリサーフェスの識別子 1 (整数) |
|
| surf_IDm | メインサーフェスの識別子 1 (整数) |
|
| Interpol | 補間フラグ 5
(整数) |
|
| Tol | セグメント検索の許容値 デフォルト = 0.02(実数) |
|
| ITIED | サーフェス結合のオプション 4
(整数) |
|
| Bcopt | 運動学的拘束条件非アクティブ化フラグ 6
(整数) |
|
| skew_ID | 極補間のためのスキューシステム識別子 5 (整数) |
|
| node_ID | 極補間のための参照節点番号 5 (整数) |
|
| XC | 回転中心のX座標 (実数) |
|
| YC | 回転中心のY座標 (実数) |
|
| ZC | 回転中心のZ座標 (実数) |
|
| XN | 回転軸を定義するベクトルのX成分 (実数) |
|
| YN | 回転軸を定義するベクトルのY成分 (実数) |
|
| ZN | 回転軸を定義するベクトルのZ成分 (実数) |
|
| 回転角度 (実数) |
||
| XT | 並進ベクトルのX成分 (実数) |
|
| YT | 並進ベクトルのY成分 (実数) |
|
| ZT | 並進ベクトルのZ成分 (実数) |
コメント
- メインサーフェスの粗さは、セカンダリサーフェスの粗さ以上とする必要があります。各メインセグメントは、少なくとも反対側のサーフェスのセカンダリ節点上にある必要があります。
- ユーザーは、ALE境界条件(/ALE/BCS)、ALEリンク(/VEL/ALE(廃止))を使用するか、剛体移動に適用できる多孔プロパティ(/PROP/TYPE15 (POROUS))を使用して、グリッド速度について指定できます。
- このインターフェースは、インターフェースTYPE2と同様に運動学的条件となります。セカンダリサーフェスのいずれの節点上にも、他の運動条件を設定することはできません。
- ITIEDフラグは、結合定式化を設定します。
- ITIED = 0 (フリー)の場合アルゴリズムは、各セカンダリ節点に対応する、メインセグメントの隣接節点を継続的に検索します。この節点がセグメント平面上にある必要はありません。これは通常の場合です。
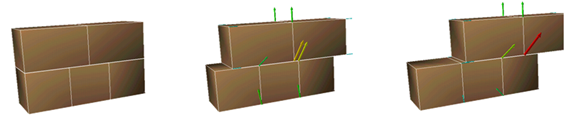
図 2. - ITIED = 1 (タイド)の場合まず隣接節点を検索した後で、セカンダリ節点の当初のメインセグメント上にその節点を維持できるようなグリッド速度が計算されます。

図 3. - ITIED = 2 (周期的)の場合変換マトリックス(ライン6から8で定義されている並進および回転)がセカンダリ節点に適用されます。その後、隣接節点がオプションITIED =1に関して検索されます。これにより、1つまたは2つの異なる領域にある2つの面の間で連結し、角度の周期性を再現できるようになります。一方の面から出たすべての材料が、回転後にもう一方の面に入れられます。
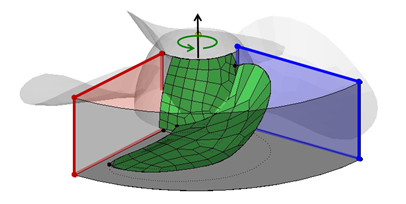
図 4. - ITIED = 3(伝達なし)の場合
運動量方程式のみで2つのサーフェスと密度伝達を結び付け、エネルギーは伝達されません。これは、メッシュが独立した状態のままLagrange側と流体側を結び付けるために使用できます。結果は、通常は1方向の結合となります。関連する/ALE/MATで修正スケールファクターの流束に明示的に1を設定した場合は、2方向の結合がアクティブになります。
定式化ITIED = 1の場合を除き、ユーザーは、取り付け節点が対応サーフェスに面していることを確認する必要があります。
- ITIED = 0 (フリー)の場合
- 回転機械の場合は、垂直方向の極補間のほうが正確になります。
- Interpol = 1の場合は、ユーザーが回転軸のスキュー(skew_ID)と中心(node_ID)を指定します。これらの値を指定しない場合は、以下のデフォルトが使用されます:
- skew_ID =0の場合、全体座標系のx軸が極軸となります。中心節点を指定した場合は(node_ID)、これが極座標系の原点として扱われます。それ以外の場合は、全体座標系の原点が使用されます。
- スキューシステムを指定している場合は、スキューの最初の軸が極軸です。スキューシステムのタイプが“移動”の場合は、そのスキューシステムで最初に指定した節点が考慮されます。それ以外の場合は、中心節点(node_ID)を定義するとこれが原点となり、定義していないときには全体座標系の原点(0,0,0)が使用されます。
- このBcoptオプションを使用すると、運動量のインターフェース処理でセカンダリ節点を削除できます。他の何らかの運動学的条件を適用すると、このフラグの値に従って節点が削除されます。
- Bcopt = 0: デフォルト値を2に設定
- Bcopt = 1:節点を削除しない他の運動条件を設定した節点があると、警告が表示されます。この設定は推奨されませんが、いくつかの運動条件が同じ挙動になる限り許容されます(例えば、固定されているメイン節点に結び付けたセカンダリ節点がb.c.を固定している場合です)。
- Bcopt = 2:Lagrange/Lagrangeインターフェース(/INTER/LAGMUL/TYPE2)のセカンダリまたは剛体のセカンダリでもあるセカンダリ節点が省略されます。他の競合する運動学的条件がある場合は、オプション1の場合と同様に警告が表示されます。
- Bcopt = 3:オプション2の場合と同様ですが、完全に固定されている節点も省略されます。
このオプションは、質量およびエネルギーの移動には影響しません。
- 変換マトリックスは、中心(XC,YC, andZC)で軸(XN,YN, ZN) 周りの角度 の回転と、その後の並進(XT,YT, andZT)により得られます。
- このインターフェースは、ALE多相材料則LAW 37およびLAW 51とは適合性がありません。