アンチロックブレーキシステム
Assembly Wizardを使用して乗用車モードや小型トラックモードを構築するときに、アンチロックブレーキの搭載を選択できます。アンチロックブレーキのMotionViewシステムでは、Functional Mock-up Unit(FMU)としてMotionViewにインポートしたABS Activateモデルへの入力として、ホイール速度、車両の縦加速度、フロントとリアのマスターシリンダー圧力、ブレーキペダルスイッチなどの情報をMotionViewモデルから収集します。ABS Activateモデルは、ホイールのスリップを推定し、制動状態でホイールがロックしそうになると、ブレーキキャリパーごとの変調油圧をMotionViewのABSシステムに出力します。MotionViewのABSシステムは、この圧力をMotionViewのブレーキシステムに出力します。アンチロックブレーキのAltair Activateモデル(.scmファイル)は、表示または編集を目的としてMDLライブラリ(…\hwdesktop\hw\mdl\mdllib\Common\FMU_Library\ABS)に用意されています。以下の図は、ABSのActivateモデルとMotionViewのブレーキとの関係を示しています。
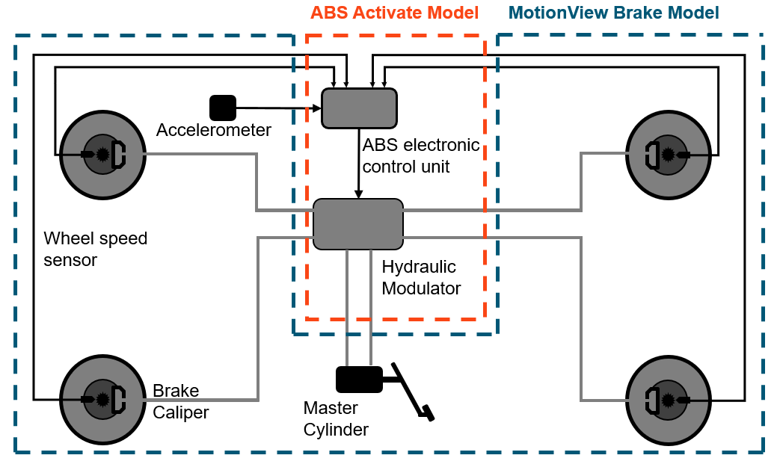
図 1.
図 1.
以降の各セクションでは、ABSのActivateモデルと、Assembly Wizardを使用して、ABSを搭載した車両モデルを構築する方法について説明します。
ABSのActivateモデル
Altair Activateによるアンチロックブレーキシステムは、ブロックの左側に入力ポート、右側に出力ポートがあるスーパーブロックです(下図をご参照ください)。
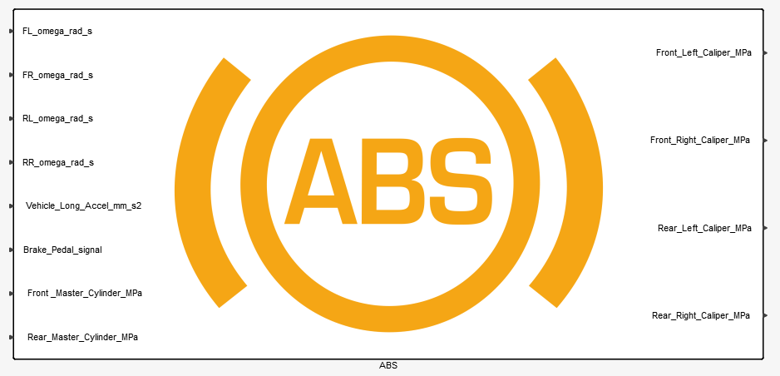
図 2.
図 2.
すべての入力がセンサー信号を表します。ただし、油圧制御バルブを通過する流量の物理特性をモデル化するために必要なフロントとリアのマスターシリンダー油圧は除きます。下の図に示すようにABSスーパーブロックを展開すると、2つの重要なサブブロックとして、ABS電子制御ユニットと油圧モジュレータがあることがわかります。各サブブロックについては、別途後述します。
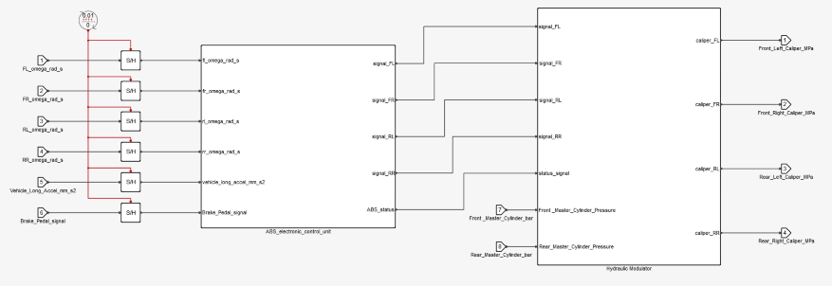
図 3.
図 3.
- ABS電子制御ユニット
- ABS電子制御ユニットは、ホイールのスリップを推定したうえで、油圧を変調して制御信号を油圧モジュレータに送信するかどうかを判断します。

図 4.ほとんどのABS制御アルゴリズムが、状態を急激に切り替えるオンオフ制御を採用しています。ここでは、ABSコントローラーによって、圧力の3つの状態である“適用”、“保持”、“開放”を切り替えます。このコントローラーでは、ホイールのスリップ速度とホイールの角加速度を推定したうえで、次のアルゴリズムに従って必要なバルブ状態信号を出力します。ホイールのスリップは、次のように、ホイールの回転速度と車両の縦速度から推定します。ここで: :ホイールのスリップ
:ホイールのスリップ :ホイールの回転速度
:ホイールの回転速度
 :車両の縦速度
:車両の縦速度
 :タイヤの半径
:タイヤの半径
 :小さい値
:小さい値

図 5.ホイールの角加速度は、次のように、ホイールの回転速度を使用して計算します。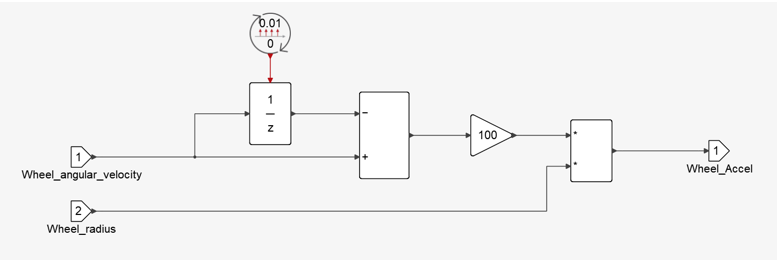
図 6. はセンサーのサンプリング時間です。スリップの計算で使用する車両の縦速度は、ホイールの速度と車両の縦加速度から推定します。
はセンサーのサンプリング時間です。スリップの計算で使用する車両の縦速度は、ホイールの速度と車両の縦加速度から推定します。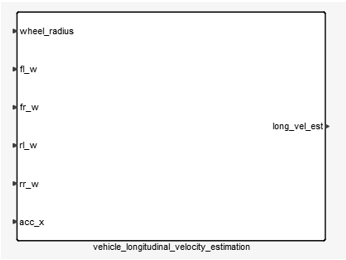
図 7.サンプリングごとに、次の3つの補助信号を計算します。- 4つのタイヤで平均したホイール速度
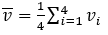
- 2つの非駆動タイヤで平均したホイール速度

- 縦加速度

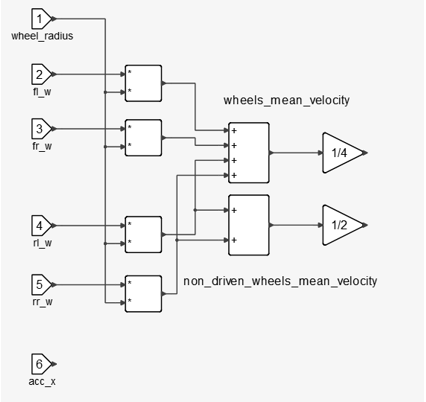
図 8.この推定アルゴリズムの動作は、次の4つの値で表現した車両のステータスによって異なります。 車両の速度がきわめて遅い
車両の速度がきわめて遅い 車両が加速中
車両が加速中 車両が一定速度にあるか、ゆっくり減速中
車両が一定速度にあるか、ゆっくり減速中 車両が減速中
車両が減速中
このステータスの計算は、1つ前の時間ステップにおけるステータスと、アルゴリズムの安定化を目的とするヒステリシスを設定したしきい値に基づきます。

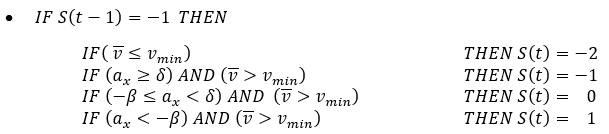


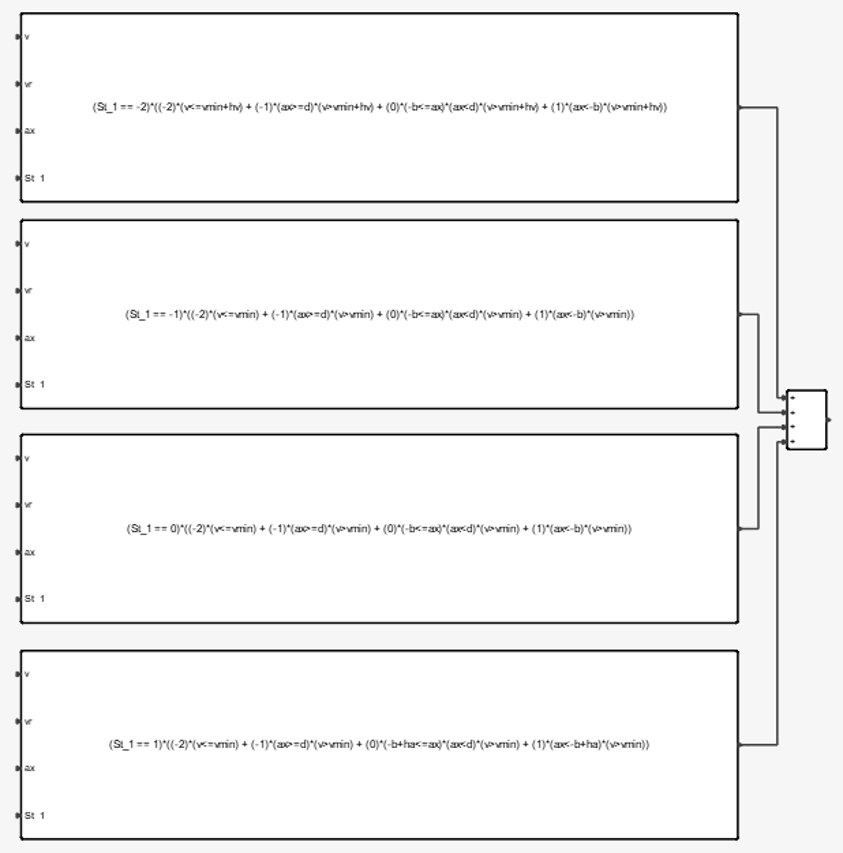
図 9.車両の現在のステータスに基づく速度推定は次のとおりです。最後に、ABS電子制御ユニットでは、ABSのトリガーも実行します。このトリガーは、ホイールに顕著なスリップが発生したときに発生します。ここでは、ブレーキ圧力をABSモジュールで制御するかどうかを指定するスイッチとして電子制御ユニットが機能します。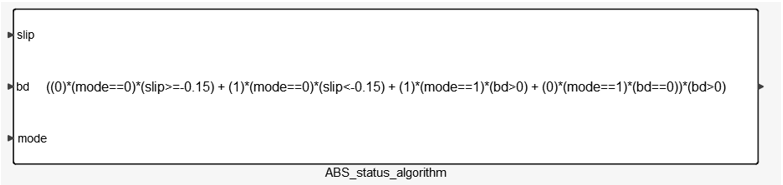
図 10. - 油圧モジュレータ
- 油圧モジュレータは、ブレーキシステムのアクチュエータです。信号が発生すると、その信号に従って油圧を変更します。通常の状態
 では、マスターシリンダー圧力がキャリパーに作用します。ABSがアクティブになると
では、マスターシリンダー圧力がキャリパーに作用します。ABSがアクティブになると 、キャリパー圧力が一定の速度で減少、維持、または増加します。
、キャリパー圧力が一定の速度で減少、維持、または増加します。 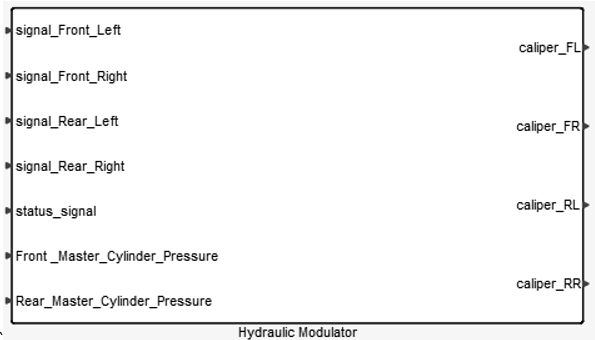
図 11.圧力の変化速度は、Activateで1次伝達関数 としてモデル化します。
としてモデル化します。 は圧力の変化速度の大きさ、
は圧力の変化速度の大きさ、 はバルブが安定状態に達するまでの遅延時間です。
はバルブが安定状態に達するまでの遅延時間です。 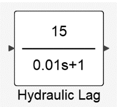
図 12.最後に、キャリパーに作用する圧力を変えるために積分器を使用します。この積分器は、キャリパーの圧力をシミュレートするので、正しく初期化して飽和状態にする必要があります。その初期化を実現するために、ABSのアクティブ状態を追跡するイベントトリガーを使用します。積分器の飽和状態を実現するために、Driverのブレーキ操作によるマスターシリンダー圧力をABSが超えないようにアンチワインドアップ積分器が設計されています。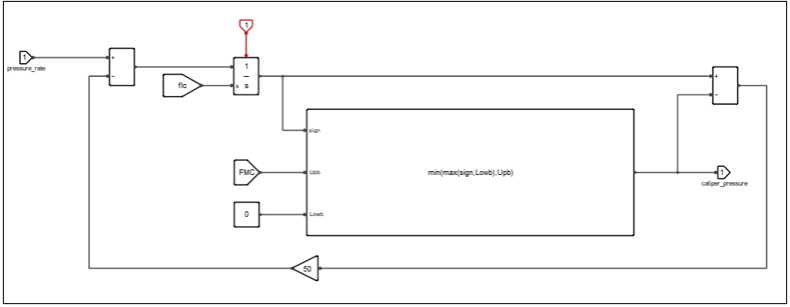
図 13.












ABSを搭載した車両モデルの作成
以下の手順に従って、ABSを搭載したフルビークルモデルを作成します。
- MBD-Vehicle Dynamics Toolsプリファレンスファイル()を読み込みます。
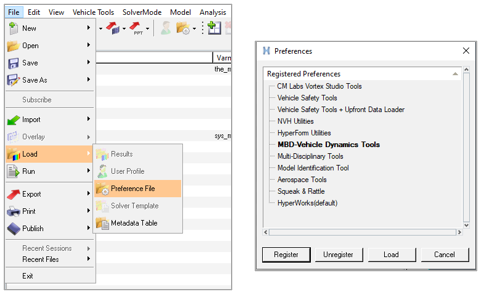
図 14. - ModelタブでAssembly Wizardを選択します。
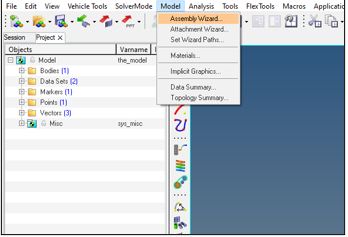
図 15. - ダイアログの8ページでAnti-Lock Brake Systemを選択します。
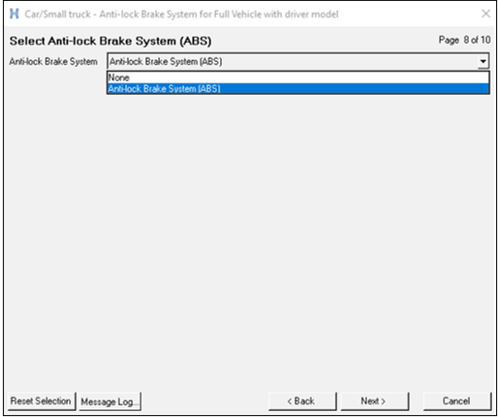
図 16.
Assembly Wizardで所定の選択を完了すると、Altair Driverとアンチロックブレーキシステムを搭載したフルビークルモデルが得られます。
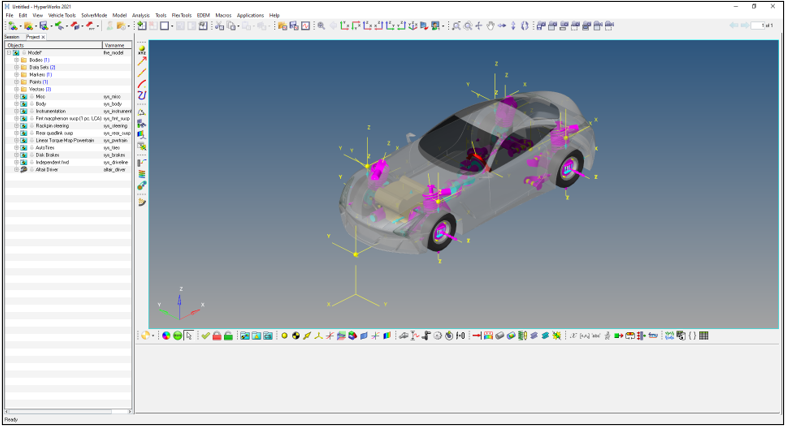
図 17.
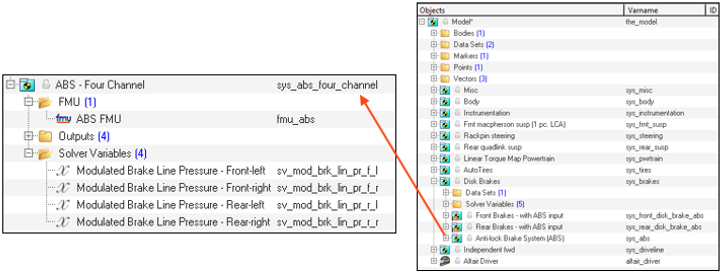
図 18.
図 17.
図 18.