トラクション制御システム
ブレーキ操作中だけでなく、タイヤと路面との接触領域で強い縦方向の力が伝達されるときにも重大な運転状況が発生する可能性があります。その理由は、過剰な縦方向のスリップが誘引されることから、伝達できる横方向の力が減少することにあります。発進と加速のときにも重大な状況の発生が考えられます。特に、滑りやすい路面、傾斜地、コーナリングでその可能性が高くなります。このような状況ではドライバーが誤った反応を示して、車両が不安定になる傾向があります。
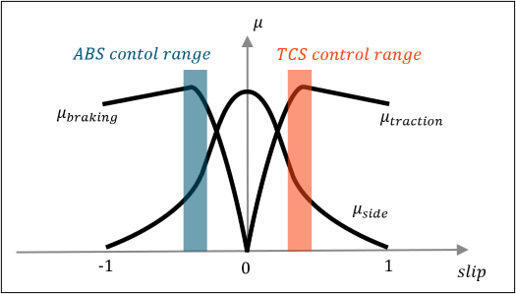
図 1.
最新の車両では、スロットル位置を測定するセンサーにスロットルペダルが接続されています。ここで測定した信号が車両のコンピューターによってスロットルアクチュエーターに送信され、エンジンの吸気が制御されます。この構成はドライブバイワイヤと呼ばれ、TCの動作に必須の機能です。TCはホイール回転速度センサーと加速度センサーを使用して縦方向のスリップ量を計算し、車輪がスピンしないようにドライバーのスロットル基準を調整します。
Assembly Wizardを使用して乗用車や小型トラックのモデルを構築するときに、トラクション制御システムの搭載を選択できます。MotionViewシステムのTCでは、ホイールの回転速度、車両の縦加速度、Driverのスロットル要求などの情報をMotionViewモデルから収集し、Functional Mock-up Unit(FMU)としてMotionViewにインポートしたTC Activateモデルへの入力としています。TC Activateモデルは、車輪のスリップを推定して、MotionViewのパワートレインシステムに調整済みスロットルを出力します。パワートレインシステムは、この調整済みスロットルに基づいて、車両を運転するうえで必要な等価トルクを出力します。Traction Controller Activateモデル(.scmファイル)はMDLライブラリ(…\hwdesktop\hw\mdl\mdllib\Common\FMU_Library\TC)に用意されていて、表示と編集ができます。
以下の図は、TC ActivateモデルとMotionViewのパワートレインモデルとの関係を示しています。
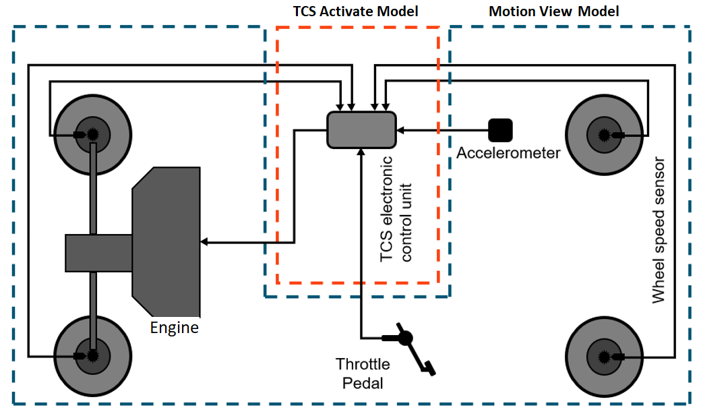
図 2.
ActivateのTCモジュール
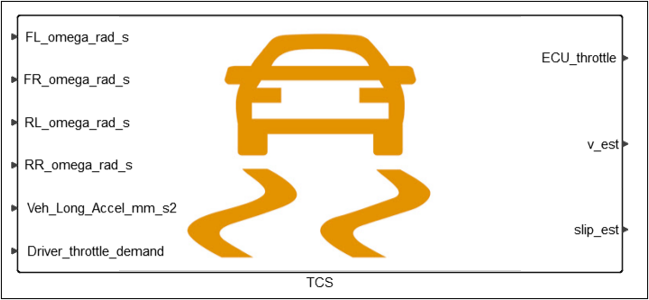
図 3.
TCのスロットルコントローラー
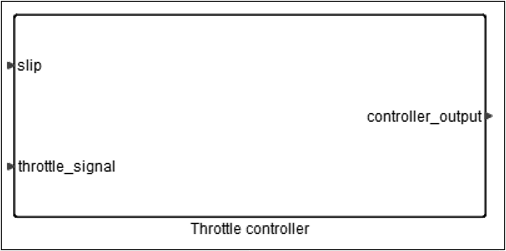
図 4.
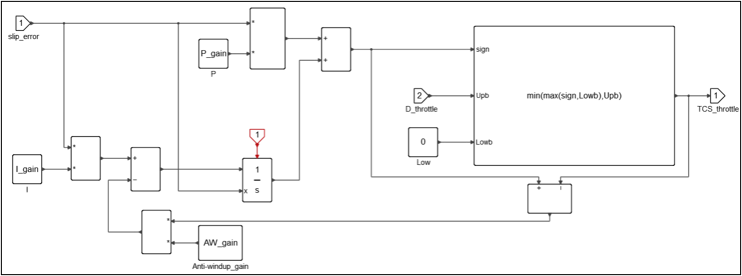
図 5.


 :縦方向のスリップ
:縦方向のスリップ :ホイールの回転速度
:ホイールの回転速度
 :車両の縦速度
:車両の縦速度
 :タイヤの半径
:タイヤの半径
 :=0のときに不定な値が発生しないようにするための微小値
:=0のときに不定な値が発生しないようにするための微小値

図 6.
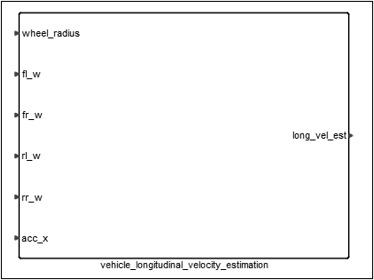
図 7.
- 4つのタイヤで平均したホイール速度
- 2つの非駆動タイヤで平均したホイール速度

- 縦加速度

以下のブロック図にあるように、非駆動輪を特定するスイッチがあります。

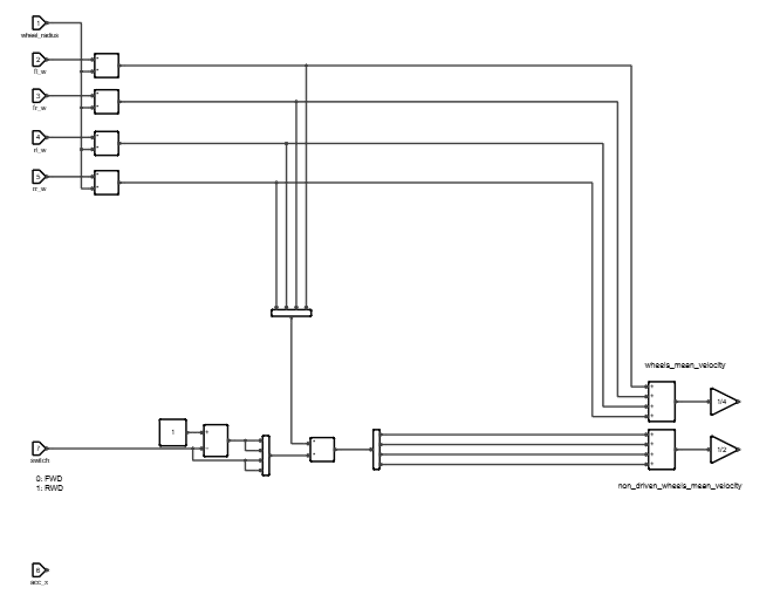
図 8.
 車両の速度がきわめて遅い
車両の速度がきわめて遅い 車両が加速中
車両が加速中 車両が一定速度にあるか、ゆっくり減速中
車両が一定速度にあるか、ゆっくり減速中 車両が減速中
車両が減速中
このステータスの計算は、1つ前の時間ステップにおけるステータスと、アルゴリズムの安定化を目的とするヒステリシスを設定したしきい値に基づきます。

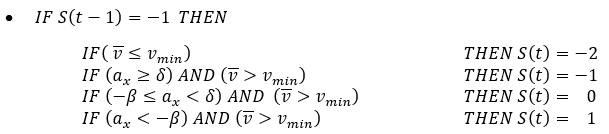


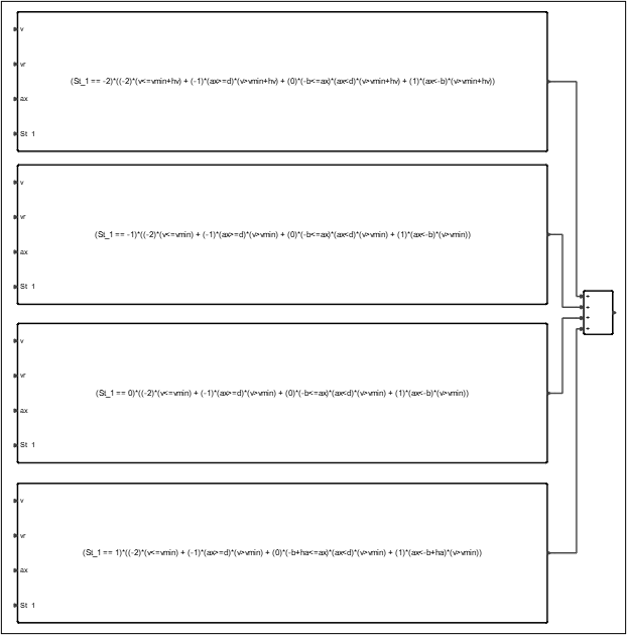
図 9.






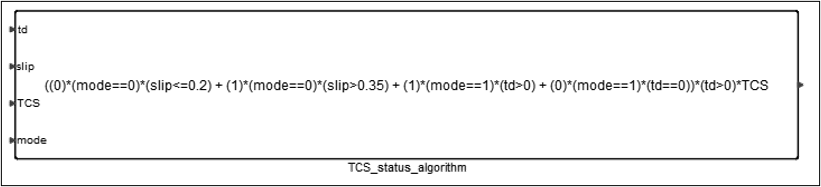
図 10.
図 11.
トラクションコントロールシステム(TC)を搭載した車両モデルの作成
- MBD-Vehicle Dynamics Toolsプリファレンスファイル()を読み込みます。
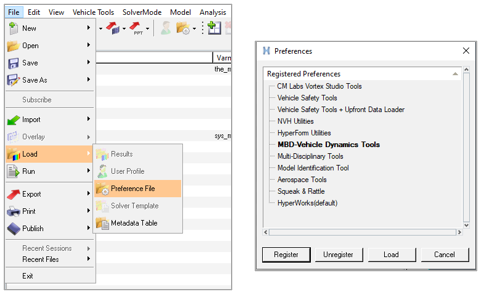
図 12. - ModelタブでSet Wizard Path、Car/Small Truckの順に選択します。
- ModelタブでAssembly Wizardを選択します。
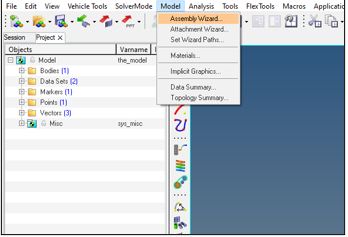
図 13. - ダイアログの8ページでTraction Controller (TC)を選択します。
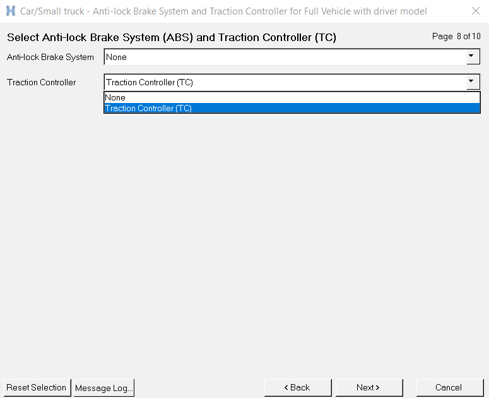
図 14.
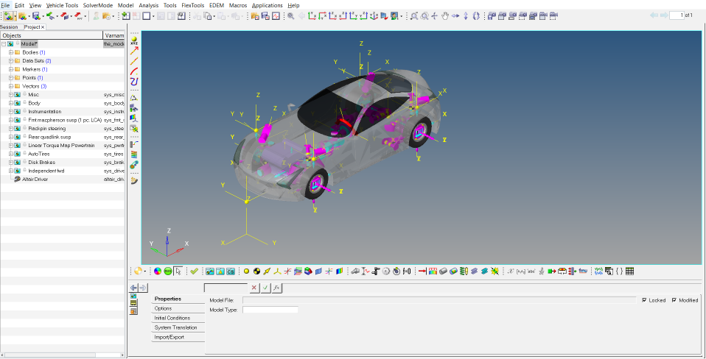
図 15.
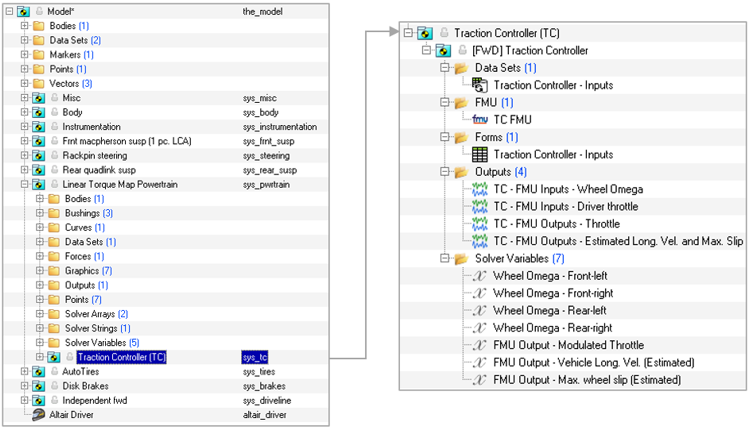
図 16.
 図 17.
図 17.