Electronic Stability Program
障害物回避などの危険な運転操作中は、過剰な横滑りによって車両が簡単に制御不能になる可能性があります。ステアリング操作中、特に、高速時は、大きな横力がタイヤに作用します。このような力が、車両に作用して最終的にその方向が定まるヨーモーメントの原因になります。ただし、このような力がトラクションによって限界に達すると、車両は必要な操作を実行できなくなり、不安定になります。そのために、Electronic Stability Program(ESP)が導入されました。
ESPは、ブレーキシステムの介入を通して車両の安定性を向上させる運転支援システムです。個別のホイール制動によって、ESPは、車両のヨーモーメントを制御できるため、そのステアリング挙動も制御できます。
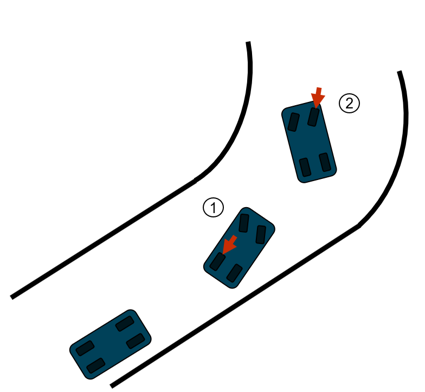
図 1. アンダーステアまたはオーバーステア時のESP制動作用
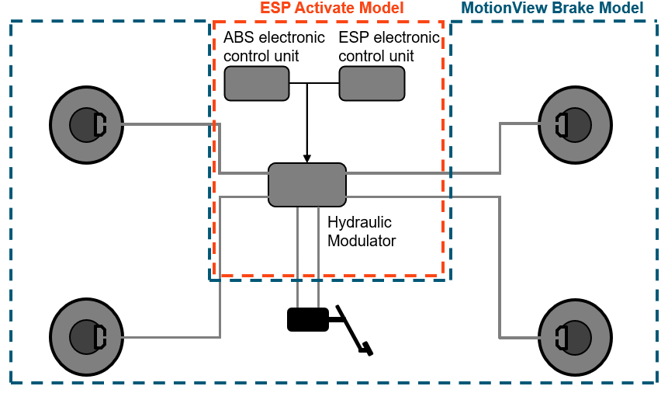
図 2. ブレーキシステムにおけるESP介入
ActivateでのESPモジュール
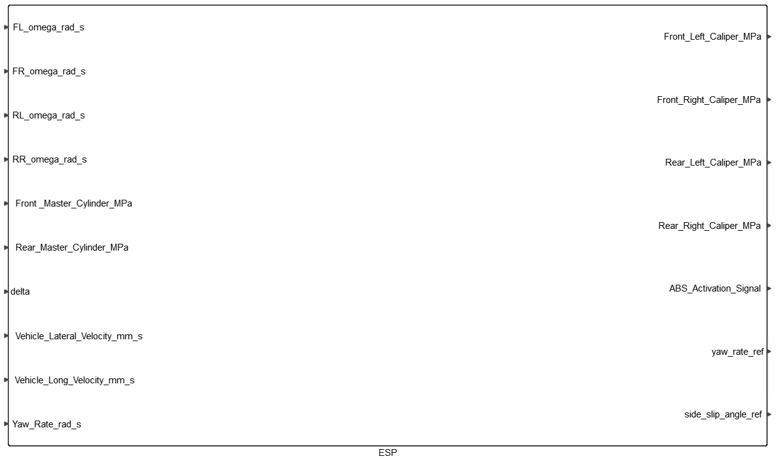
図 3. ActivateでのESPブロック
一部の信号はセンサーからの信号(ホイール速度、車両の縦速度と横速度、ステアリング角、ヨーレート)を表しますが、他の信号はMotionViewの油圧パートからActivateの油圧パートに接続されています(マスターシリンダー圧力)。車両速度は、通常、測定ではなく推定されます。現在の実装では、制御システムの挙動に焦点を当てるために、これらの値がMBS車両モデルの出力として使用されています。
ESP電子制御ユニット

図 4. ActivateでのESP電子制御ユニット
- ヨーレートと横滑り角の基準値
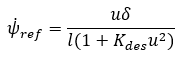
- ヨーレートと横滑り角の基準値は、単一トラック車両モデルの動きの定常状態方程式を線形化することによって得られます。
ヨーレートの基準値の場合:
ここで、
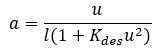
 は車両の縦速度、
は車両の縦速度、 は前輪のステアリング角、
は前輪のステアリング角、 は車両のホイールベース、および
は車両のホイールベース、および は目的のアンダーステアリング係数です。車両の実際のアンダーステアリング係数は、次の式で計算できます:
は目的のアンダーステアリング係数です。車両の実際のアンダーステアリング係数は、次の式で計算できます: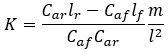
ここで、
 は前車軸と後車軸のコーナリング剛性、
は前車軸と後車軸のコーナリング剛性、 は車両の重心から前車軸と後車軸の距離、および
は車両の重心から前車軸と後車軸の距離、および は車両の重量です。
は車両の重量です。ヨーレート基準の計算では、タイヤと路面間の摩擦限界の上限を考慮することも重要です。
そのため、
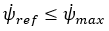
ここで、
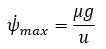
ここで、
 はタイヤと路面間の摩擦係数、
はタイヤと路面間の摩擦係数、 は重力加速度です。
は重力加速度です。したがって、不連続性を回避するための最終的なヨーレート基準は、次のように計算できます:

ここで、
横滑り基準の場合:
 Activateでは、方程式(1)と(2)を次のように実装できます:
Activateでは、方程式(1)と(2)を次のように実装できます: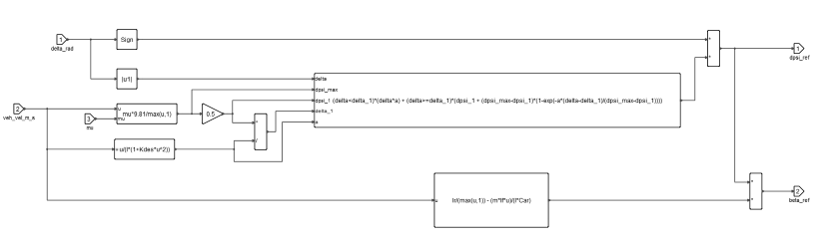
図 5. Activateでのヨーレートと横滑り角の基準基準値の計算では、MotionViewからの信号と信号を除いて、一部のパラメータを次のようにActivateにおけるモデル初期化で設定する必要もあります。
図 6. ActivateでのESPパラメータ - 制御法則
- 前述したように、ESPは、ヨーレートと横滑り角の誤差を使用して、目的の車両のヨーモーメントを生成します。つまり、制御法則は次のような比例コントローラとして表すことができます。

ここで、 と
と は、コントローラの比例ゲインです。
は、コントローラの比例ゲインです。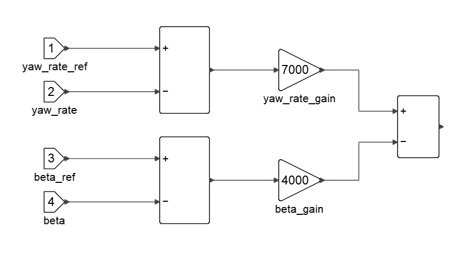
図 7. ActivateでのESP制御法則前述したように、ESPのアクチュエーターは車両のブレーキシステムです。目的の車両のヨーモーメントは、個別のホイール制動によって作成されます。
アンダーステアリングの場合は、前車軸がグリップを失っているため、後輪にブレーキがかけられるのに対して、オーバーステアリングの場合は、後車輪がグリップを失って、前輪にブレーキがかけられます。つまり、車両の旋回の方向(左または右)とアンダーステア条件(アンダーステアまたはオーバーステア)を取得することによって、目的のヨーモーメントを生成するための制動に最適なタイヤが選択されます。Activateで作成されるタイヤ選択アルゴリズムを以下に示します: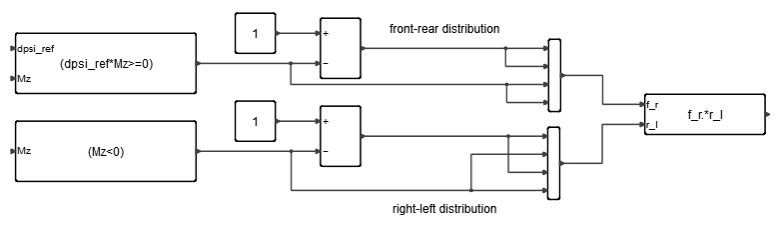
図 8. ActivateでのESPからのタイヤ選択目的の車両のヨーモーメントは、油圧モジュレータから生成される目的のキャリパー圧で表される必要があります。ヨーモーメントは、まず、適切なトラック幅(前または後ろ)を使用することによって、タイヤの縦力で表されます。次に、タイヤの半径を使用した制動トルク、最後に、ブレーキシステムパラメータを使用した制動圧で表されます。Activate内の実装を以下に示します: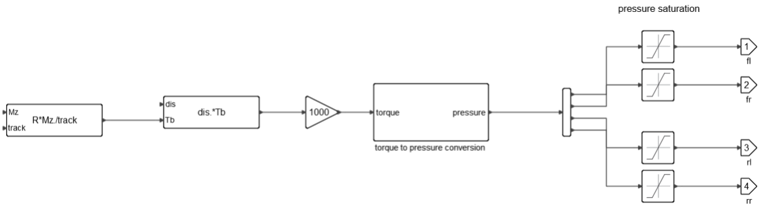
図 9. Activate内のブレーキ圧に対するヨーモーメント - ABS
-
ESPの制動中のホイールロックを避けるために、下位コントローラとしてのABSが縦スリップを監視します。制動状態と同様に、圧力が増加、維持、または減少のいずれかになるように、ブレーキ圧が油圧モジュレータを通してABS ECUによって調節されます。ABSの設計ロジックと機能の追加情報については、アンチロックブレーキシステムのトピックをご参照ください。
ESPを搭載したフルビークルモデルの作成
- Fileメニューからを選択します。
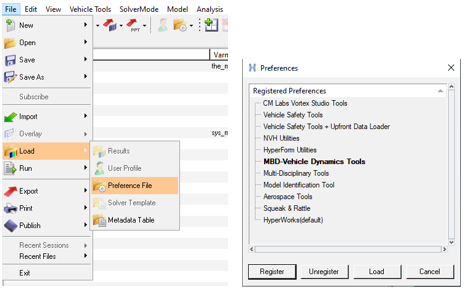
図 10. - ModelメニューからAssembly Wizardを選択します。
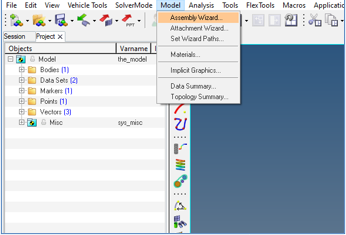
図 11. - Select ABS/ESP and TCで、Electronic Stability Program (ESP)オプションを選択できます。
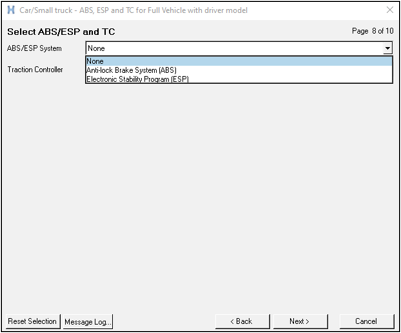
図 12. - Assembly Wizardの選択を完了すると、Altair DriverとElectronic Stability Programを搭載したフルビークルモデルが得られます。
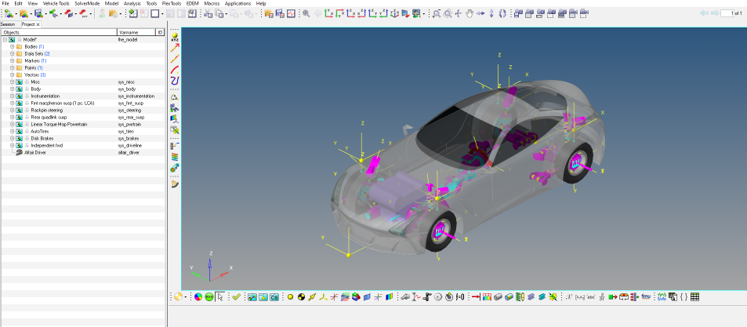
図 13.
図 14.