J-turn
J-turnイベントは、ある方向に大きくステアを切り、車両が応答できるよう滞留時間をとり、反対方向に大きくステアを切るという車両の応答を、応答時間を延長してシミュレートします。
このイベントは、車両の安定性を明らかにするために使用されます。ステアリング入力の符号を逆にすることによって、どちらの操縦方向にすることも可能です。Altair Driverを使用して車両を一定速度に維持します。またTireシステムとOutput Requestsシステムには、車両とタイヤの標準出力が組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
このイベントにより適切な名前はフィッシュフック操縦です。このイベントは、DOT publication DOT HS 809 705、”Phase VIII of NHTSA's Light Vehicle Rollover Research Program-A Demonstration of the Dynamic Tests Developed for NHTSA's NCAP Rollover Rating System”で説明されているNHTSAフィッシュフックテストをシミュレートできるよう設計されています。
J-turnは、一般に、起こり得る最も悪い車両応答がわかるよう、さまざまなステア入力とイベントタイミングで再実行する必要があります。
参考資料
ISO +7401-2003 – Road Vehicles-Lateral transient response test methods-Open-loop test methods.
イベント入力
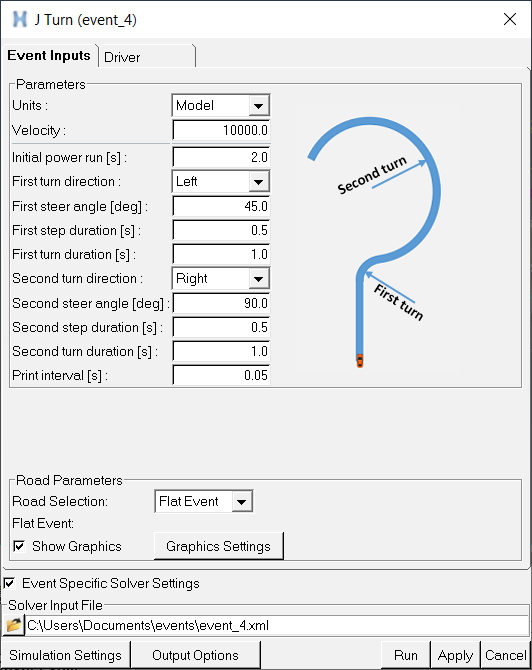
図 1.
- イベントパラメータ
-
パラメータ 説明 Units 速度の単位の選択(Model、m/s、km/h、mph) Velocity 初期車両速度。 Initial power run イベントの開始で、車両が定常状態に達したことを確認する時間。 First turn direction 最初の旋回で使用するステア方向。 First steer angle 最初のステアリング入力の角度(度)。正の数では車両が右に、負の数では車両が左に曲がります。 First lean angle* 1回目の旋回の要求傾斜角。 First step duration 1回目のステア角の入力に要する時間(ステップ関数を使用してステアリングホイールに角度を入力します)。 First turn duration ステアリングを1回目のステア角に保持しておく期間。 Second turn direction 2度目の旋回で使用する方向を定義。 Second steer angle 2回目のステア入力のステア角(度単位)。 Second lean angle* 2回目の旋回の要求傾斜角。 Second step duration 2回目のステア角の入力に要する時間(ステップ関数を使用してステアリングホイールに角度を入力します)。 Second turn duration ステアリングを2回目のステア角に保持しておく期間。 Print interval プロットファイル(.plt)とグラフィックスファイル(.h3d)にデータを出力する時間間隔。 *二輪車イベントにのみ適用できます。
- 路面パラメータ
- 路面パラメータを使用して、イベントで車両が走行する路面を選択します。平坦路、イベントエディターで選択した路面データファイル、またはタイヤで選択した路面データファイルから、使用する路面を選択できます。以下の表で、各パラメータについて詳しく説明します。
パラメータ 説明 Road Selection このオプションメニューで、イベント用として選択する路面を指定します。次の3つの選択肢があります。 - Flat Road - 平坦で滑らかな路面をイベントに使用します。路面ファイルは必要ありません。路面設定を使用して、路面のグラフィックスとMUを制御します。
- From Event - イベントの路面ファイルの欄から路面ファイルを選択します。イベントの実行では、モデルのすべてのタイヤでこの路面ファイルが使用されます。
- From Tires - モデルにあるタイヤごとに、AutoTireパネルでそのタイヤに選択した路面ファイルが使用されます。したがって、タイヤごとに異なる路面ファイルを使用できます。
Road SelectionがFlat Roadの場合 Road SelectionがFlat Roadの場合は、自動的に生成された平坦路のデータファイルに対してイベントが実行されます。
Mu (Friction Scale) タイヤと路面との摩擦をスケーリングする0以上の値を入力します。タイヤと路面との摩擦はタイヤプロパティで定義する点に注意します。したがって、ここで0.5と入力すると、タイヤと路面との摩擦係数が0.8の場合、実効的な摩擦係数は0.5*0.8 = 0.4になります。 Show Graphics 平坦路用のグラフィックスを作成する場合に、このボックスをオンにします。Event EditorでApplyボタンまたはRunボタンをクリックしたときに、このグラフィックスが作成される点に注意します。 Graphic Settings 平坦路グラフィックスを制御するダイアログを表示するには、このボタンをクリックします。この制御の詳細については、後述するRoad Settingsをご参照ください。 Road SelectionがFrom Eventの場合 Road File Road SelectionオプションがFrom Eventの場合は、路面ファイルの欄を使用してイベント用の路面ファイルを選択します。 Road SelectionがFrom AutoTiresの場合
Road SelectionがFrom AutoTiresの場合は、タイヤごとにAutoTireパネルで指定した路面プロパティファイルによる路面上をタイヤが走行します。この場合は、タイヤごとに異なる路面ファイルを使用できます。たとえば、右タイヤと左タイヤにそれぞれ別々の路面を使用することで、タイヤごとに異なる垂直外乱を指定できます。
Driver
Driverタブを使用して、比例、積分、および微分(Proportional, Integral and Derivative: PID)のゲインと出力信号フィルタリングを設定します。Driverで採用しているPIDコントローラーは車両によって異なります。
PIDコントローラー
- Lean PID
- 傾斜車両の場合、Lean PIDでは入力として要求傾斜角をとり、フロントフォーク角(ステアリング角)を出力します。開ループのイベントでは、傾斜角要求は時間の関数になります。閉ループの経路追従イベントでは、横方向経路誤差を補正した経路曲率と車両速度に基づいて要求傾斜角を計算します。詳細については傾斜角度コントローラー - 二輪車のほか、傾斜可能な二輪車両と三輪車両のゲイン調整もご参照ください。
- Lateral Error PID
- 傾斜車両の場合、Lateral Error PIDでは入力として横方向経路誤差の予測値をとり、要求傾斜角の増分を出力します。横方向誤差は、以降の先読み時間までの経路を基準とした車両の横方向位置を予測することによって計算します。Lateral Error PIDは、経路をたどる車両を傾けるように作用します。詳細については傾斜角度コントローラー - 二輪車をご参照ください。
- Longitudinal PID
- Longitudinal PIDコントローラーを任意の車両に追加して、縦方向コントローラーのフィードフォワードセクションでは考慮されない外乱を補正し、定常誤差を除去できます。Longitudinal PIDでは、速度誤差を入力としてとり、スロットルを出力します。
詳細についてはAltair Driverの数学的手法をご参照ください。
信号設定
信号設定を使用して、Driverから出力するステアリング、スロットル、ブレーキ、ギア、およびクラッチの各信号の最小値、最大値、および初期値を設定します。スムージング周波数を使用して、Driverによる信号変更の頻度を制御します。Driverからの閉ループ制御信号のみが平滑化されます。開ループ信号は平滑化されません。
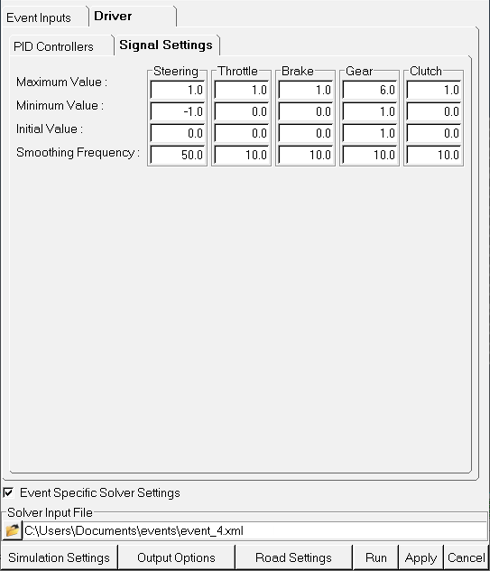
図 2.
Road Settings
Road Settingsダイアログでは、矩形路面グラフィックスの表示を制御します。
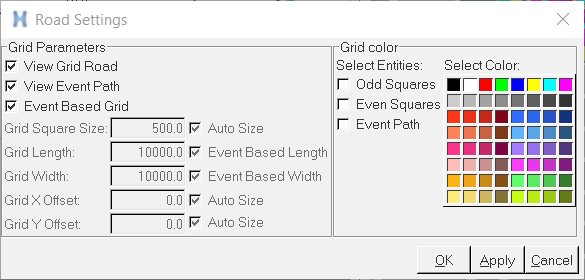
図 3. Road Settingsダイアログ
Grid Parameters
| パラメータ | 説明 |
|---|---|
| View Grid Road | View Grid Roadチェックボックスは、路面グリッドグラフィックスのオンとオフを切り替えます。 |
| View Event Path | View Event Pathチェックボックスは、イベント経路グラフィックスのオンとオフを切り替えます。 注: このチェックボックスは、経路を使用しない開ループイベントでは無効になります。
|
| Event Based Grid | Event Based Gridオプションをオンにすると、定常円旋回イベントの初期直線路や半径などのイベントパラメータに基づいて路面グラフィックスの長さと幅のサイズが自動的に設定されます。路面グラフィックスのサイズを入力するには、Event Based Gridオプションをオフにします。 |
| Grid Square Size | 路面グラフィックスの正方形の長さと幅を指定する正数をモデルの単位で入力します。 |
| Grid Length | 路面グラフィックスの長さを指定する正数をモデルの単位で入力します。 |
| Grid Width | 路面グラフィックスの幅を指定する正数をモデルの単位で入力します。 |
| Grid X Offset | 路面グラフィックスを縦方向にオフセット配置する距離を指定する値をモデルの単位で入力します。 |
| Grid Y Offset | 路面グラフィックスを横方向にオフセット配置する距離を示す値をモデルの単位で入力します。 |