事前定義された経路
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'CONSTANT_RADIUS'
RADIUS = 40
INITIAL_STRAIGHT = 10
ENTRY_ANGLE = 0.39車両は下の図に示すように経路を追従します:
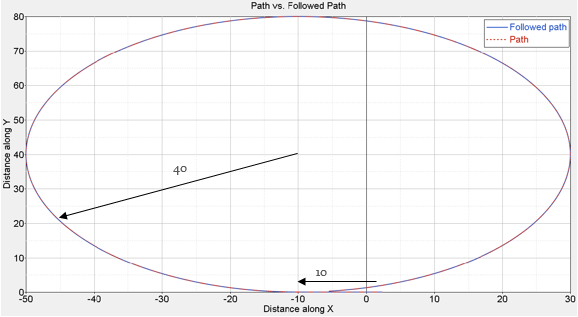
図 1.
図 1.
| [CONSTANT RADIUS] | ||
|---|---|---|
| TYPE | 属性-文字列 | 必須 <CONSTANT_RADIUS> |
| RADIUS | 属性-実数 | 必須 円の半径 |
| INITIAL_STRAIGHT | 属性-実数 | 必須 旋回に入る前の初期直線の長さ |
| TURN | 属性-文字列 | オプション
|
同様に、
[PATH]
TYPE = 'SLALOM'
NUMBER_OF_CONES = 3
DESIRED_CG_LATERAL_DISP = 3
CONE_SPACING = 50
RECOVERY_LENGTH = 20
INITIAL_STRAIGHT = 20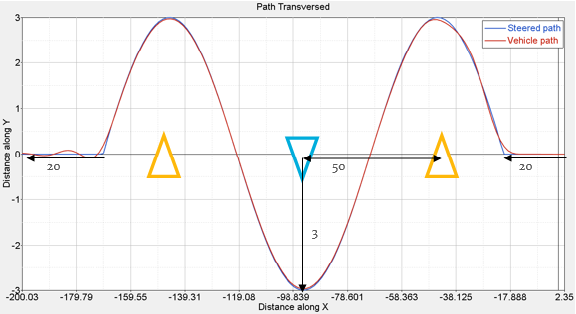
図 2.
| [SLALOM] | ||
|---|---|---|
| TYPE | 属性-文字列 | 必須 <SLALOM> |
| NUMBER_OF_CONES | 属性-整数 | 必須 コーンの数 |
| DESIRED_CG_LATERAL_DISP | 属性-実数 | 必須 希望する重心の横変位 |
| CONE_SPACING | 属性-実数 | 必須 隣接するコーン間の距離 |
| INITIAL_STRAIGHT | 属性-実数 | 必須 スラロームに入る前の直線部 |
| RECOVERY_LENGTH | 属性-実数 | 必須 スラロームが終わった後の直線部 |
| ATTACK_DIRECTION | 属性-文字列 | オプション
|
直線と円弧のシーケンスとしての経路:
[FF_STEER_CONTROLLER]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'SEQUENCE_OF_ST_CRV'
BLOCK = 'PATH'
INTEGRATION_STEP_SIZE = 0.010000
AGGRESSIVE = 'TRUE'
[PATH]
{KEY PAR0 PAR1}
'ST' 20.000000 0.000000
'ARC' 40.000000 -6.283184これは、直線(20 m)と円弧(半径 40 m、角度 6.283184 rad. 時計方向)のシーケンスである経路を生成します。
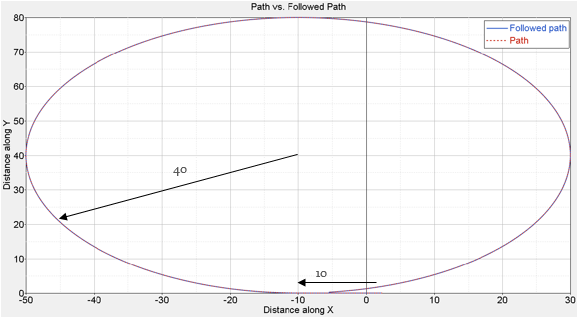
図 3.
図 3.
[PATH]
{KEY PAR0 PAR1}
'ST' 17.033191 0.000000
'ARC' 20.000000 -0.148890
'ST' 17.240436 0.000000
'ARC' 20.000000 0.148890
'ST' 17.033191 0.000000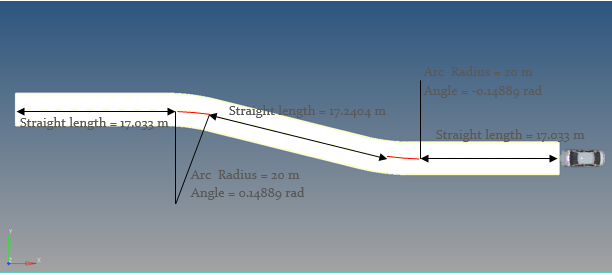
図 4.