3D Spline Road
3Dスプライン路面を使用すると、サーキットや駐車スペースなど、各種の滑らかな3次元路面を定義できます。タイヤの曲率よりも小さい曲率の路面が存在すれば、それは滑らかな路面として定義されます。
また、3Dスプライン路面では、滑らかな路面上に配置した3次元の路面障害物をモデル化できます。センターライン、幅、バンク角、路面左右の摩擦レベルで路面が定義されます。
路面のセンターラインの座標は、3次元空間に任意の線を作成することで指定できます。路面の断面は平坦であることが前提となっており、その断面で路面の幅とバンク角をデータポイントごとに指定できます。また、路面の左側と右側の摩擦レベルを指定できます。
3Dスプライン路面障害物のタイプ
- POTHOLE
- RAMP
- PLANK
- ROOF
- SINE
- SWEEP
障害物の設置
障害物は“移動距離”の手法に基づいています。各障害物のSTARTキーワードは、テーブルでこのキーワードが指定されている場所のスプラインの座標を基準として、障害物の相対的な開始距離を示します。したがって、0を指定した場合は、障害物が直ちに現れることを意味します。添付されている3Dスプライン路面サンプルでは、OBSTACLE1のSTART値が0であるため、x,y = 5,0で障害物が現れ始めます。キーワード
- 全体キーワード
- すべての障害物に必要なキーワードは次のとおりです:
キーワード 説明 START 障害物の開始位置。 - '0.0 0.0 0.0'
- 局所座標系。
- '0.0'
- 距離で定義した障害物。
LENGTH 障害物の長さ。 LENGTHは路面の長さ方向に定義します。
ROAD_TYPE 障害物タイプ。 注: 上記の各データは、障害物のタイプに関係なく、.rdfファイルで指定する必要があります。
- POTHOLE
- 四角形状の単独の穴。
ROAD_TYPE = 'POTHOLE'の場合は、‘DEPTH’キーワードを指定する必要があります。DEPTHに正数を指定すると路面の凹部であることを示し、負数を指定すると路面の凸部であることを示します。
以下のような穴のテーブルを、対応する項目を使用して追加します。キーワード 説明 DEPTH 正数または負数で指定した、障害物の深さ。 
図 1. 穴の図解 - RAMP
- 単独のランプ。立ち上がりのランプまたは立ち下がりのランプを指定します。ROAD_TYPE = 'RAMP'の場合は、以下の各パラメータを指定する必要があります。
キーワード 説明 HEIGHT ランプの高さ。 SLOPE ランプの傾斜(単位: 度) 
図 2. ランプの図解 - PLANK
- x軸に垂直かx軸に対して傾斜した単独のプランク。ベベルエッジを設定することもできます。ROAD_TYPE = 'PLANK'の場合は、以下の各パラメータを指定する必要があります。
キーワード 説明 HEIGHT プランクの高さ。 BEVEL_EDGE_LENGTH BEVEL_EDGE_LENGTHが0未満の場合、3Dスプライン路面では、ベベルエッジの代わりにラウンドコーナーが使用されます。この場合、BEVEL_EDGE_LENGTHはコーナーの曲率半径を示します。 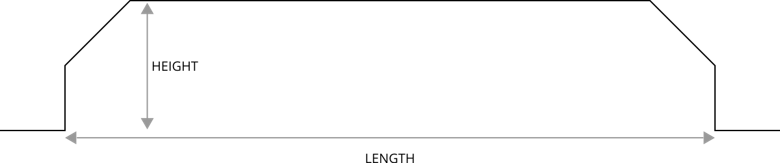
図 3. エッジを持つプランクの図解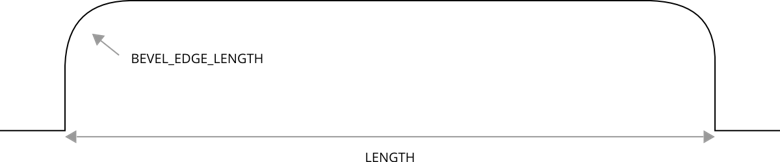
図 4. ラウンドコーナーを持つプランクの図解 - ROOF
- ルーフ型の三角形状障害物。ROAD_TYPE = 'ROOF'の場合は、以下の各パラメータを指定する必要があります。
キーワード 説明 HEIGHT ルーフの高さ。 LENGTH 三角形ルーフ底面の長さ。 
図 5. ルーフの図解 - SINE
- 波長が一定の正弦波形状。ROAD_TYPE = 'SINE'の場合は、以下の各パラメータを指定する必要があります。
キーワード 説明 AMPLITUDE 正弦波の振幅(A)。 WAVE_LENGTH 正弦波の波長(  )。
)。START 正弦波の開始地点(移動距離)(s_s)。 路面プロファイルの高さzは次の式で求められます。

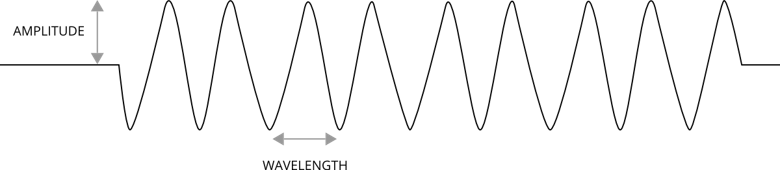
図 6. 正弦波の図解 - SWEEP
- ROAD_TYPE = 'SWEEP'の場合は、以下の各パラメータを指定する必要があります。
キーワード 説明 AMPLITUDE_AT_START 開始時の正弦波の振幅(  )。
)。AMPLITUDE_AT_END 終了時の正弦波の振幅(  )。
)。WAVE_LENGTH_AT_START 開始時の正弦波の波長(  )。
)。WAVE_LENGTH_AT_END 終了時の正弦波の波長(  )。
)。SWEEP_TYPE SWEEP_TYPE = 0の場合は周波数が線形変化します。 SWEEP_TYPE = 1の場合は周波数が対数変化します。
SWEEP_TYPEの値に応じて、路面プロファイルの高さは次の関数で求められます。- 線形スイープ
- 距離sに対して周波数が線形変化します。路面プロファイルの高さzは次の式で求められます。
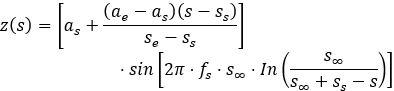
- 対数スイープ
- 周期ごとに波長が一定の係数で減少します。路面プロファイルは次の式で求められます。
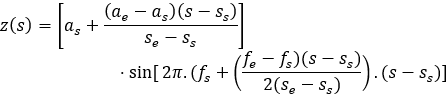
ここで、
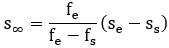
 は、開始時のssを起点とした、理論上周波数が無限大になる距離です。
は、開始時のssを起点とした、理論上周波数が無限大になる距離です。
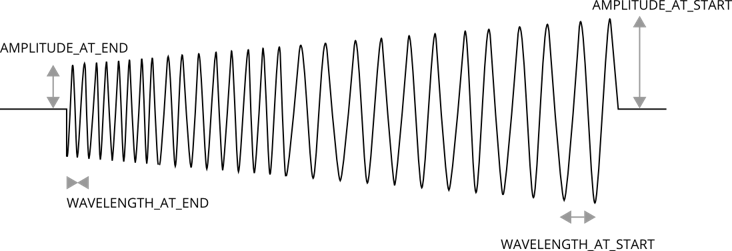
図 7. スイープの図解
3Dスプライン路面プロパティファイル
- MDI_HEADER
- データ[MDI_HEADER]の最初のブロックはTeimOrbitファイルを記述しています。
[MDI_HEADER] FILE_TYPE = 'rdf' FILE_VERSION = 5.00 FILE_FORMAT = 'ASCII' {COMMENTS} 'User entered comments go here'キーワード 説明 FILE_TYPE ファイルタイプ。 FILE_VERSION ファイルのバージョン。このファイルに変更が発生するとバージョンが変更されます。 FILE_FORMAT データのフォーマット。TiemOrbitでは必ずASCIIです。 {COMMENTS} ファイルの概要を記述したコメント。このファイルで表現している路面やデータの取得日時などを記します。 - 単位の詳細
- [UNITS]ブロックでは路面の単位を定義します。
[UNITS] LENGTH = 'meter' FORCE = 'newton' ANGLE = 'radians' MASS = 'kg' TIME = 'sec'[UNITS]キーワード 説明 LENGTH 長さの単位。 FORCE フォースの単位。 ANGLE 角度の単位。度またはラジアン。 MASS 質量の単位。 TIME 時間の単位。 - モデルの詳細
- [MODEL]ブロックでは、路面モデルと路面のバージョンを定義します。
[MODEL] METHOD = '3D_SPLINE' VERSION = 1.00[MODEL]キーワード 説明 METHOD 3D_SPLINE - グローバルパラメータ
- [GLOBAL_PARAMETERS]ブロックでは、路面全体に適用できるパラメータを定義します。
[GLOBAL_PARAMETERS] CLOSED_ROAD = 'NO' SEARCH_ALGORITHM = 'FAST' ROAD_VERTICAL = '0.0 0.0 1.0' FORWARD_DIR = 'NORMAL' MU_LEFT = 0.5 MU_RIGHT = 0.6 WIDTH = 5.000 BANK = 0.0[GLOBAL_PARAMETERS]キーワード 説明 CLOSED_ROAD 路面が閉じているか開いているかの指定。 - YES
- 路面は閉じています。
- NO
- 路面は開いています。
FORWARD_DIR 路面の前方方向の指定: - NORMAL
- 路面データポイントで指定された方向に車両が移動します。
- INVERT
- 路面データポイントで指定された方向とは逆の方向に車両が移動します。
MU_LEFT センターラインを基準とした、路面左側の路面摩擦値。[GLOBAL_PARAMETERS]ブロックで指定した路面摩擦は、[DATA_POINTS]ブロックで指定した路面摩擦値よりも優先して適用されます。 MU_RIGHT センターラインを基準とした、路面右側の路面摩擦値。[GLOBAL_PARAMETERS]ブロックで指定した路面摩擦は、[DATA_POINTS]ブロックで指定した路面摩擦値よりも優先して適用されます。
WIDTH 路面の幅。ここで指定したWIDTHは、[DATA_POINTS]ブロックで指定したWIDTH値よりも優先して適用されます。このパラメータを設定していても、[DATA_POINTS]でWIDTHパラメータを指定する必要があります。このパラメータが不要な場合は、路面データファイル(.rdf)で省略してもかまいません。
BANK 路面センターラインの左側と右側の各データポイントで路面が成す傾斜角。バンク角がゼロの場合は幅方向の線が水平になっています。この値が正の場合は、ISO参照平面に対して路面が時計回転方向に傾斜しています。
ここで指定した寸法は、[DATA_POINTS]ブロックで指定したBANK値よりも優先して適用されます。この寸法を指定していても、BANK値を指定する必要があります。この寸法が不要な場合は、.rdfファイルで省略してもかまいません。
- データポイントの情報
- [DATA_POINTS]ブロックには、表形式で路面情報を記述します。
エントリごとに以下の情報を指定する必要があります。
[DATA_POINTS] { X Y Z WIDTH BANK MU_LEFT MU_RIGHT OBSTACLE}[DATA_POINTS]キーワード 説明 X サンプリングした路面データポイントのX座標。 Y サンプリングした路面データポイントのY座標。 Z サンプリングした路面データポイントのZ座標。 WIDTH サンプリングしたポイントでの路面幅。 BANK サンプリングしたポイントでの路面の角度。この値が正の場合は、ISO参照平面に対して路面が時計回転方向に傾斜しています。 MU_LEFT サンプリングポイントでのセンターラインを基準とした、路面左側の路面摩擦。 MU_RIGHT サンプリングポイントでのセンターラインを基準とした、路面右側の路面摩擦。 OBSTACLE 障害物の情報を記述したブロックの名前。このエントリは省略可能です。