PCD [ポイントクラウドデータ]
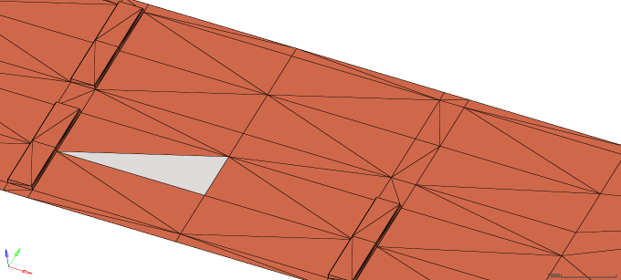
図 1. 3Dシェル
路面ファイル
下記の路面データおよびMotionSolveでの必要性に応じて追加した情報を収めたrdfファイルを用意する必要があります。HyperMeshからOptiStruct 形式で書き出した.femファイルを、rdfの代わりに直接使用することができます。その場合、すべてのパラメータはデフォルト値が使用されます。単位はモデルで定義されているものが使用されます。パラメータには、以下のものがあります:
- Unitsブロック
- 以下を記述したMODELブロック:
- Methodとして3D
および
- ROAD_TypeとしてPCD
- Methodとして3D
- 以下の内容を含むオプションのPARAMETERSブロック:
- SEARCH_TRIAS: 検索方法として三角形を設定するオプション。三角形があればデフォルトはtrueです。falseを指定すると、補間対象とする3つの節点が収集されます。このオプションについては次のセクションで詳しく説明します。
- OFFSET_ X: 原点のx座標デフォルトは0です。
- OFFSET_ Y: 原点のy座標デフォルトは0です。
- OFFSET_ Z: 原点のz座標デフォルトは0です。
- HT_INTERPOLATION:接触パッチにおける高さを求めるために使用する補間手法。使用可能な手法はBarycentric(デフォルト)またはLinearの2つです。
- BEYOND_BB_Z:路面の境界ボックス外部で使用する高さ。
- ROTATION_ANGLE_XY_PLANE: 路面参照マーカー上で路面を回転するのに使用できます。デフォルトは0です。
HT_INTERPOLATION:接触点における高さを求めるために使用する検索手法。SEARCH_TRIASオプションに応じて、節点のみまたは要素と節点による補間方法が選択されます。使用可能なオプションの表は以下に示します。
| 検索方法 | 補間方法 | |
|---|---|---|
| Linear | Barycentric | |
| 節点 | 最も近くにある3つのエンティティの平均高さ | 最も近くにある3つの節点の高さを、それぞれの距離に基づいて加重平均した値。 |
| 要素 | 要素を囲んでいる要素を構成する節点のBaycentric重み付け。 | |
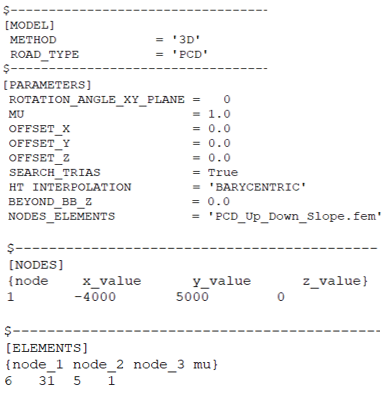
図 2. .rdfファイル例
タイヤが路面の最大境界ボックス内部にはあるものの、路面パッチの外にある場合は、それより前に認識されていた高さが使用されます。
検索方法
検索方法には、前のセクションで述べたように次の2つのオプションがあります:
- 節点と要素
- 節点のみ
- 1.節点と要素
- 路面データは、節点データと要素データで用意されます。このデータは次の2つの方法で得ることができます。
- 路面データと同じ.rdfファイルによるテーブル。
- 節点と要素のデータを収めたファイル。
- テーブル
- NODESテーブルは4つの列で構成されています。1列目は、節点番号/節点カウント。節点は頂点です。2列目、3列目、4列目は、三角形要素を構成する頂点のx座標、y座標、z座標です。
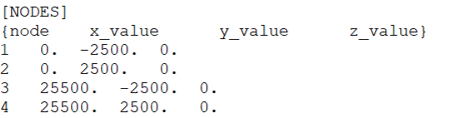 図 3. 節点のテーブルELEMENTSテーブルは4つの列で構成されています。1列目、2列目、3列目は、三角形要素を構成する頂点の節点IDです。4列目は、特定の要素の摩擦係数です。現在のところ、この情報はタイヤに渡されません。
図 3. 節点のテーブルELEMENTSテーブルは4つの列で構成されています。1列目、2列目、3列目は、三角形要素を構成する頂点の節点IDです。4列目は、特定の要素の摩擦係数です。現在のところ、この情報はタイヤに渡されません。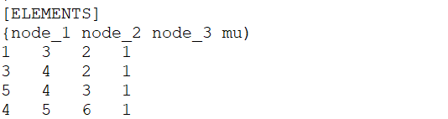 図 4. 要素のテーブル
図 4. 要素のテーブル - 節点と要素のデータを収めたファイル
- このファイルは、次に示すオプションを指定して、HyperMeshからOptiStructの.femファイルとしてエクスポートする必要があります。
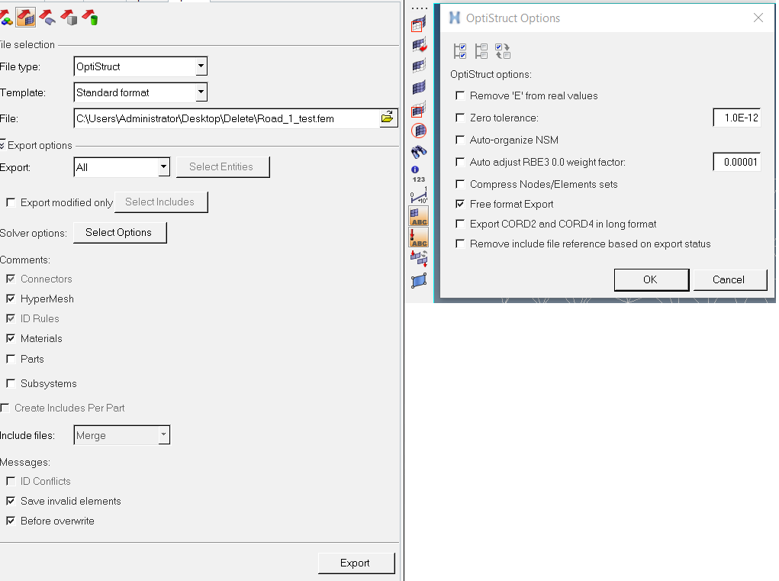 図 5. 節点と要素のデータをエクスポートするためのHyperMeshの設定次のようなデータを収めた.femファイルがエクスポートされます。
図 5. 節点と要素のデータをエクスポートするためのHyperMeshの設定次のようなデータを収めた.femファイルがエクスポートされます。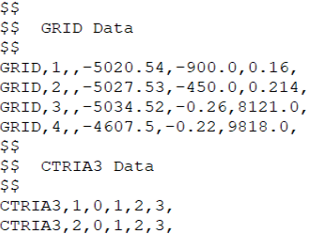 図 6. HyperMeshからOptiStructのフォーマットでエクスポートした節点と要素のデータ
図 6. HyperMeshからOptiStructのフォーマットでエクスポートした節点と要素のデータ
- 2.節点のみ
- 要素データや結合データを使用せずに路面高さを補間することもできます。ファイルに結合データがない場合は、節点のみを使用する検索方法が自動的に選択されます。接続データがあっても使用しないことを望む場合は、[PARAMETERS]ブロックでSEARCH_TRIAS=FALSEキーワードを使用すれば、節点のみによる検索方法とすることができます。
この方法では、タイヤの接地点に最も近い3つの点を取得することで路面高さを補間できます。この3点は、仮想的な三角形要素の頂点として機能します。このプロセスの他の手順は、要素に基づく路面高さの補間と同様です。
- 用途
-
両方の検索方法にはそれぞれ独自の利点があります。その利点を考慮して、使用する検索方法を判断する必要があります。この判断には次の情報が有用です。
要素に基づく路面高さ補間の利点:- メッシュで表現したフィーチャーを制御することにより、目的とする最終的な路面を全面的に制御できます。
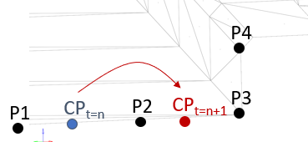 図 7. 路面高さの補間方式
図 7. 路面高さの補間方式上図は路面の断面を示しています。CPは、平坦なサーフェス上に配置した、タイヤの接地点です。P1、P2、P3、P4は4つの点です。CPに最も近い3点を考慮して路面高さが補間されます。P1とP2の間にCPがあれば、P1、P2、P3を考慮して路面高さが補間されます。P2とP3の間にCPがあれば、P2、P3、P4を使用して路面高さが計算されます。メッシュを制御することで、路面高さ補間の精度も制御でき、それによって路面の詳しい表現も制御できます。
- メッシュを作成することで、メッシュ要素の数を制御できます。検索対象とする要素の数を削減する際にこの制御が効果的です。今後参照するために、要素をキャッシュに収めておくこともできます。これはCPUの演算時間を短縮するうえで効果的です。点の場合は、要素がないことから容易に参照できるデータがありません。
- 数値近似に起因してシミュレーションのたびにタイヤの位置がわずかに移動しても、再現性が確保されます。この移動位置が要素の範囲内にあれば、出力値は変化しません。一方、点のみを使用した方法ではこの再現性を保証できなくなります。別の点が接地点に近くなれば、補間後の高さが異なるからです。
それでも、以下の場合は節点のみを使用した路面高さ補間が必要になります:- 車両のシミュレーションに関する概念を得るために、近似した結果で十分な場合。
- 三角形メッシュの作成と取得が不可能な場合。
- メッシュで表現したフィーチャーを制御することにより、目的とする最終的な路面を全面的に制御できます。
ベストプラクティス
三角形化された路面を最大限に活用するには、以下を実行することをお勧めします。
- 最初の時点で、起伏のあるサーフェスや傾斜しているサーフェスに車両を配置すると、MotionSolveでタイヤの静的均衡を確保することが困難になります。このような問題が発生している場合は、平坦なサーフェスに車両を配置することをお勧めします。
- 平坦なサーフェス上では、できる限り大きい要素を使用します。
- 小さい要素は、形状の曲率を捕捉する目的でのみ使用するようにします。
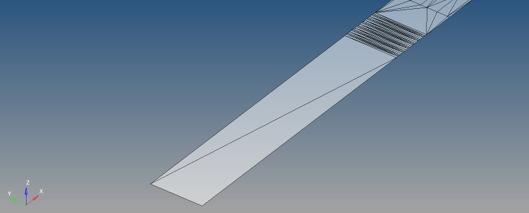
図 8. 平坦なサーフェスに使用する大きい要素と、曲率を捕捉するための小さい要素 - x/y座標が同じ位置に複数の節点が存在する場合、正確に垂直な要素をその座標位置に配置しないようにします。代わりに、最下部の節点と最上部の節点の位置に、0.001mのようなわずかな差異を設定するようにします。
図 9. 上記のような正確に垂直な要素を設定しない