演習1:ユーザーサブルーチンの基礎
本演習ではユーザーサブルーチンについて学び、単気筒エンジンのモデルを実行します。
演習を始める前に、モデルファイルengine_baseline.mdlおよびすべてのH3Dファイルをmbd_modeling\motionsolve\python_usersubフォルダーから自身の<作業ディレクトリ>にコピーしてください。
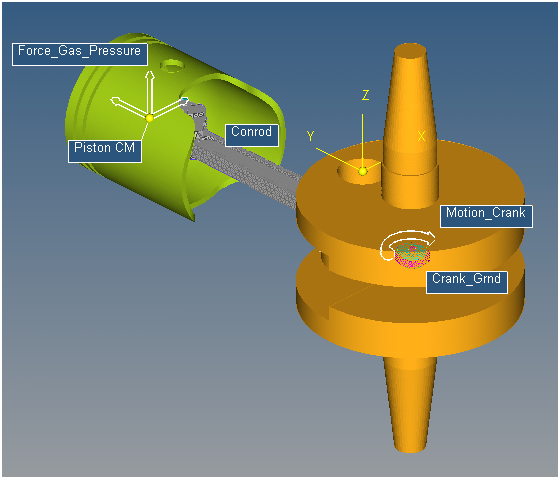
図 1. 単気筒エンジンモデル
演習に使われるモデルは単気筒エンジンで、カーブ、出力、フォース、およびモーションエンティティを使用します。システムは、デフォルトの減衰も使用します。
- カーブはCSVファイルから読み込まれ、コネクティングロッドの角変位に基づいたフォース値を与えます。
- 出力は、ピストンの変位の大きさを返します。
- フォースエンティティは、コネクティングロッドの角とカーブを用い、ピストンの可変圧力フォースを課します。
- モーションエンティティは、Crank_Grnd回転ジョイントに角運動を課します。
- システムのデフォルトの減衰は1ですが、これはBodiesパネルで変更することが可能です。
| エンティティ | ユーザーサブルーチン | 説明 | |
|---|---|---|---|
| Curve | SPLINE_READ | カーブデータファイルを読み込み | |
| Request | REQSUB | リクエストされた値を出力 | |
| Force | GFOSUB | システムにフォースを適用 | |
| Motion | MOTSUB | システムにモーションを適用 | |
| Damping | DMPSUB | 弾性体の減衰を定義 |
モデルの実行
このステップでは、モデルを実行し、ユーザーサブルーチン結果と比較するための結果ファイルを得ます。
-
 (Run)ボタンをクリックします。
(Run)ボタンをクリックします。
-
Runパネルから
 (Open File)をクリックし、<作業ディレクトリ>に進みます。MotionSolve XMLファイルの名称をengine_baseline.xmlと指定します。
(Open File)をクリックし、<作業ディレクトリ>に進みます。MotionSolve XMLファイルの名称をengine_baseline.xmlと指定します。
-
 をクリックし、モデルのエラーを確認します。
をクリックし、モデルのエラーを確認します。
- Run ボタンをクリックします。