演習3:ユーザーサブルーチンでシミュレーションを実行
本演習では、演習2:ユーザーサブルーチンの追加でインプリメントしたユーザーサブルーチンでシミュレーションを実行し、演習1のStep モデルの実行における初期テストからの結果と比較します。
モデルの実行
このステップでは、インプリメントされたユーザーサブルーチンでモデルを実行します。
-
ツールバーで、
 (Run)をクリックします。
(Run)をクリックします。
-
 (Open)ボタンをクリックし、Step DMPSUBを使ったカスタム弾性体減衰の追加で保存された*.xmlファイルをブラウズします。
(Open)ボタンをクリックし、Step DMPSUBを使ったカスタム弾性体減衰の追加で保存された*.xmlファイルをブラウズします。
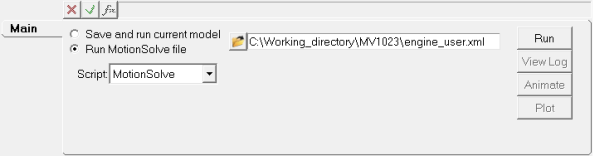
図 1.
HyperGraphを使った変位の大きさのプロッティング
このステップでは、両方のシミュレーションからの出力とHyperGraphを使って、ピストンの変位の大きさを比較します。
-
 (Add Page)ボタンをクリックします。
(Add Page)ボタンをクリックします。
-
Client Selectorドロップダウンメニューから、クライアントをMotionSolveからHyperGraph 2Dに切り替えます。
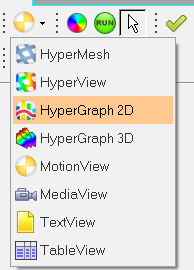
図 2. -
ベースライン結果をプロットします。
-
HyperGraphで、
 (Build Plots)アイコンをクリックします。
(Build Plots)アイコンをクリックします。
-
パネル内で、
 (Data Fileブラウザ)を使って、baseline_abfファイルを開きます。
(Data Fileブラウザ)を使って、baseline_abfファイルを開きます。
- デフォルトのx変数はTimeのままとします。Y Typeには、Marker Displacementを選択します。Y Requestは空白のままとします。Y ComponentにDMを選択します。
- 適用(Apply)をクリックします。
-
HyperGraphで、
-
ユーザーサブルーチン結果をプロットするために、Step 3を繰り返します。Y TypeにREQSUBを、Y ComponentにRESULT
(2)を使用します。
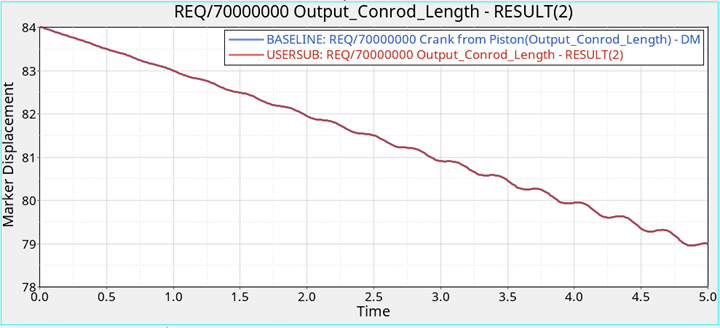
図 3. 両モデルシミュレーションからの出力結果の比較
HyperViewを使った弾性体の応力の比較
このステップでは、HyperViewを使って弾性体の応力と変形を比較します。
-
(Add Page)ボタンをクリックします。
-
Standardツールバーから
 (Load Results)アイコンをクリックします。
(Load Results)アイコンをクリックします。
-
 (Entity Attributes)ボタンをクリックします。
(Entity Attributes)ボタンをクリックします。
-
パネル内の、DisplayOptiStructの横でOffボタンをクリックします。
注: Auto apply modeのボックスにチェックマークが入っていることを確認します。

図 4. -
Resultsツールバーで、
 (Contour)アイコンをクリックします。
(Contour)アイコンをクリックします。
-
Contourパネルで、Result typeをDeformation->Displacement (v)に設定し、モデリングウィンドウ内のflexbodyをクリックします。

図 5. -
続いて、
 (Tracking Systems)アイコンをクリックします。
(Tracking Systems)アイコンをクリックします。
-
Page ControlsツールバーからPage Window
Layoutドロップダウンメニューを開き、
 (ウィンドウ2つのレイアウト)をクリックします。
(ウィンドウ2つのレイアウト)をクリックします。
-
Animationツールバーから
 (Start/Pause Animation)ボタンをクリックし、モデルをアニメーション表示します。
(Start/Pause Animation)ボタンをクリックし、モデルをアニメーション表示します。
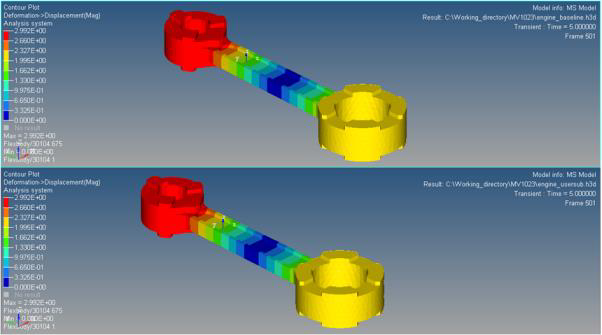
図 6. HyperViewでの弾性体変形の比較