def SPLINE_READ(id, file_name, block_name):
import csv
ifile= open('pressure_curve.csv','r') ## opens data file as
readable variable
curv = csv.reader(ifile) ## reads csv data, stores as
useable var.
L = [] ## creates empty list
for item in curv:
L.append(item) ## separates file values into list
L = L[1:] ## removes block names from list
i=0 ## creates counter
x = 16*[0.0]
y = 16*[0.0] ## splits list into x and y lists
while i < (len(L)-1):
x[i] = float(L[i][0]) ## changes values from str to float
y[i] = float(L[i][1])
i+=1 ## counter increment
z = 0.0 ## defines z value
ifile.close() ## closes data file
errflg = py_put_spline(id,x,y,z) ## var to create MotionSolve
spline
return errflg ## returns var
def REQSUB(id, time, par, npar, iflag):
[D, errflg] = py_sysfnc("DM",[par[0],par[1]]) ## sets "D" as piston
displacement mag
result = [0,D,0,0,0,0,0,0] ## lists results for output
return
return result ## sends list with results to motionsolve as
output
def GFOSUB(id, time, par, npar, dflag, iflag):
from math import pi
[A, errflg] = py_sysfnc("AZ",[par[1],par[2]]) ## retreives conrod
angle
B = ((-1)*A*180)/pi ## converts radians
to degrees
[C, errflg] = py_akispl(B,0,par[0],0) ## interpolates data to fit
curve
return [0,C[0],0] ## returns C data as force values
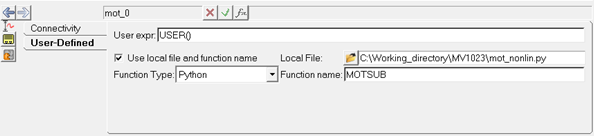
def MOTSUB(id, time, par, npar, iord, iflag):
if iord==0: ## function
A = 10.0461*time
elif iord==1: ## first derivative
A = 10.0461
else: ## second derivative
A = 0.0
return A ## returns function based on iord input
def DMPSUB(id, time, par, npar, freq, nmode, h):
cratios = nmode*[0.0] ## makes preallocated list for markers
for i in range(nmode):
cratios[i] = 1.0 ## sets marker damping to 1
return cratios ## returns damping values
Pythonスクリプトをインプリメントします。
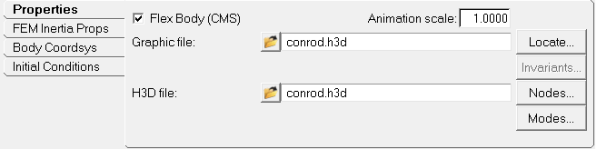
Projectブラウザから、Conrodボディ(モデル内の弾性体)をクリックします。
Propertiesタブから、Modes...ボタンをクリックします。
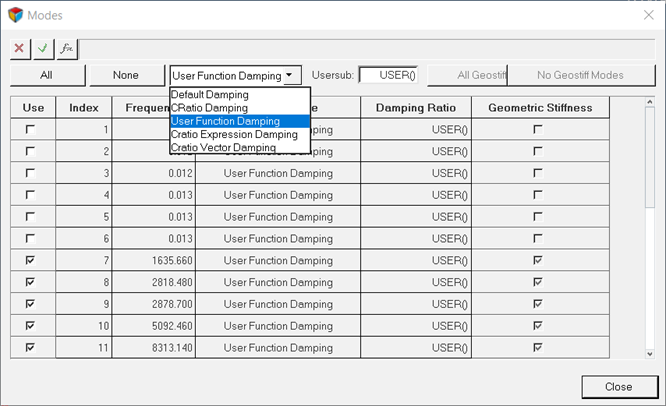
図 9.
Modesダイアログで、ドロップダウンメニューからUser
Function Dampingを選択します。Usersub欄に式'USER()’を入力します。
 (Curve)ボタンをクリックします。
(Curve)ボタンをクリックします。
 (ファイルブラウザ)を使ってpressure_curve.csvファイルを選択します。
(ファイルブラウザ)を使ってpressure_curve.csvファイルを選択します。
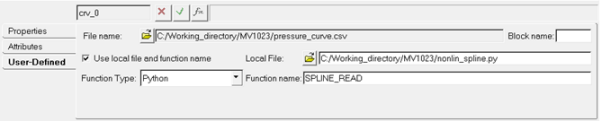 図 1. SPLINE_READユーザーサブルーチンを使ったカーブパネル
図 1. SPLINE_READユーザーサブルーチンを使ったカーブパネル (Outputs)パネルをクリックします。
(Outputs)パネルをクリックします。
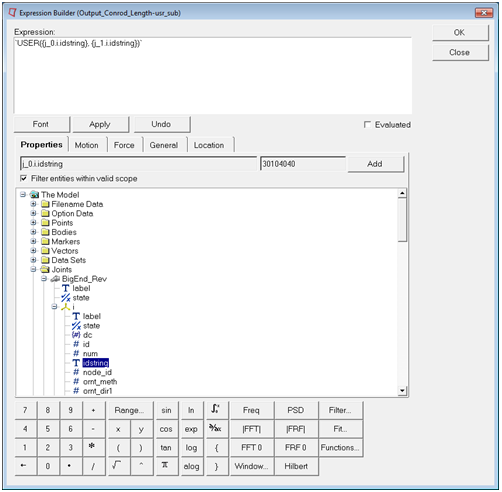
 ボタンをクリックしてExpression Builderを開きます。テキスト欄で、波括弧のセットを2つ(“{},{}”)追加します。
ボタンをクリックしてExpression Builderを開きます。テキスト欄で、波括弧のセットを2つ(“{},{}”)追加します。
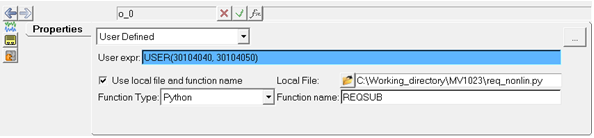
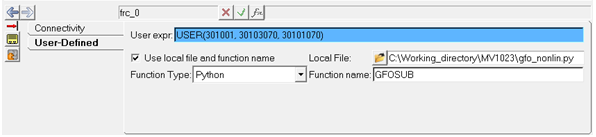
 (Local File)ファイルブラウザを使ってreq_nonlin.pyスクリプトを選択し、Function nameテキスト欄がREQSUBとなっていることを確認します。
(Local File)ファイルブラウザを使ってreq_nonlin.pyスクリプトを選択し、Function nameテキスト欄がREQSUBとなっていることを確認します。
 (Force)アイコンをクリックします。
(Force)アイコンをクリックします。
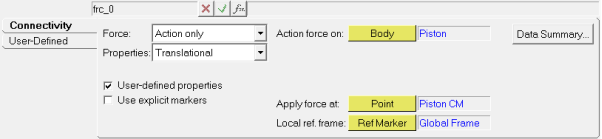 図 4.
図 4. 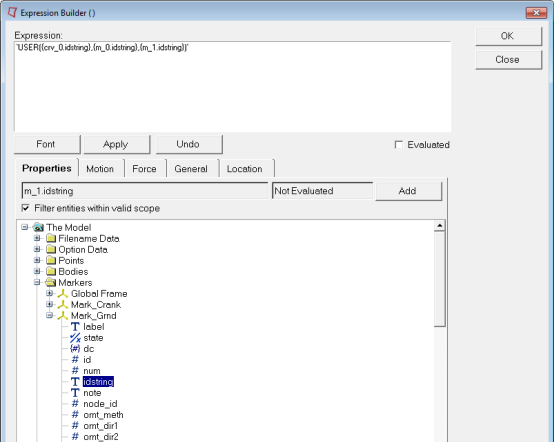
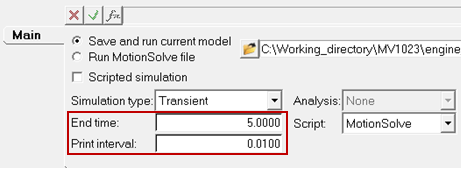
 (Run)ボタンをクリックします。
(Run)ボタンをクリックします。