Output Options
Output Optionsダイアログを使用して、出力オプションに関するユーザープリファレンスを設定します。
このダイアログには、次の2つのタブがあります。
Generalタブ
Generalタブを使用して、出力ファイルタイプ、ゼロトレランス、およびデバッグオプションを設定します。| オプション | 詳細 | |
|---|---|---|
| Plot file options | ||
| Multibody result file (.mrf) | .mrfフォーマットに結果ファイルを書き込みます。 | |
| ASCII plot file (.plt) | .pltフォーマットにプロットファイルを書き込みます。 | |
| Altair binary file (.abf) | .abfフォーマットにプロットファイルを書き込みます。 | |
| Write result data per time | 指定の時刻で1件以上の結果が存在する場合に、ABFファイルとPLTファイルに単位時間あたりで出力する結果データを選択します。指定できるオプションはALL、FIRST、またはLASTです。 | |
| Measure rotation | ドロップダウンメニューから角度結果の形式を選択します。指定できるオプションはYAW_PITCH_ROLLまたはEULER_ANGLESです。 | |
| Do not append REQ/id to output | 出力の名前に接頭辞が付加されないようにするには、この設定をONにします。接頭辞の名前は、3文字のキーワードと出力IDの組み合わせで、たとえばREQ/70000001となります。 | |
| Capture max penetration during contact | 2つの書き出しタイムステップ間で貫通の深さが両方のタイムステップよりも大きい際に、ソルバーに追加の出力を導入するようフラグを立てます。 | |
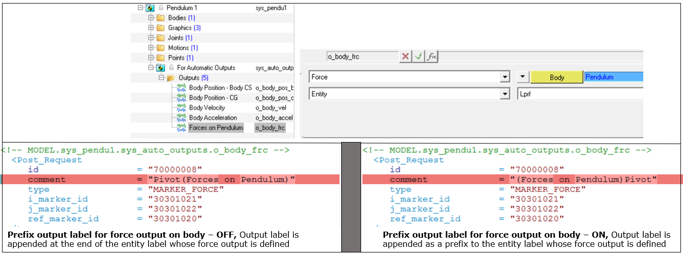
| Prefix output label for force output on body | 任意のボディにあるフォースタイプ出力のラベルをソルバーデックにどのように書き込むかを制御します。 | |
|
注: Prefix output label for force output on
bodyオプションをオンにすると、ボディとの接続のラベルに出力ラベルが接頭辞として付加されます。オフにしている場合は、接続のラベルの末尾に出力ラベルが付加されます。
 |
||
| Zero tolerance | ||
| Displacement | ここで指定した値より小さい出力変位は0に設定されます。 | |
| Velocity | ここで指定した値より小さい出力速度は0に設定されます。 | |
| Acceleration | ここで指定した値より小さい出力加速度は0に設定されます。 | |
| Force | ここで指定した値より小さい出力フォースは0に設定されます。 | |
| Debug options | ||
| Write debug info | ソルバー解析ステップのデバッグ情報の生成を制御する論理フラグです。 | |
| Generate animation at each iteration (use with single Static simulation only) | デバッグ目的で反復ごとにアニメーションフレームの生成を制御する論理フラグです。 | |
H3Dタブ
H3Dタブを使用して、アニメーションファイルのプリファレンスを設定できます。
| オプション | 詳細 |
|---|---|
| Animation file (.h3d) | .h3dフォーマットにアニメーションファイルを書き込みます。 |
| Write h3d results for every step | .h3dファイルに結果を書き込む頻度を制御します。 |
| Write h3d results starting at | .h3dファイルへの結果の書き込みの開始時刻を制御します。 |
| Stop writing h3d results at | .h3dファイルへの結果の書き込みの終了時刻を制御します。 |
| Format | ドロップダウンからH3Dファイルフォーマットを選択します。
|
| Stress |
ドロップダウンから、H3Dファイルでの応力のフォーマットを選択します。
|
| Strain |
ドロップダウンから、H3Dファイルでのひずみのフォーマットを選択します。
|
| Contact forces | .h3dファイルの接触力のベクトルアニメーション。 |
| Flexible body velocity & acceleration | MotionSolveを実行しているときの、弾性体の速度と加速度の出力。 |