ベルト-プーリーサブシステムの作成
ベルト-プーリーサブシステムでは、長くて柔らかいベルトを回転するプーリーの周りに巻き付けることにより、機械動力を伝達します。動力はベルトとプーリー表面の摩擦によって伝達されます。MotionViewのベルト-プーリーサブシステムを使用すれば、プーリー中心位置、半径、ベルト特性などの最小限の入力でこのようなシステムを短時間で組み立てることができます。
ベルト-プーリーでは、モデルに以下のエンティティが存在している必要があります。
- ベルトプーリーシステムが全体座標系のXZ面以外の平面に存在する場合は、プーリーによって形成される平面と一致するようなXZ平面を持つ参照マーカーが必要です。NLFEベルトの定式化では、ベルトのXZ平面と参照座標系のXZ平面を平行にする必要があります。
MotionViewは、次の2種類のベルトプーリーシステムを提供しています。
- 非線形有限要素(NLFE)ベース – ベルトは、一連の結合された非線形有限要素ビームとしてモデル化されます。このモデルは、正確なベルトの応力とひずみを返す忠実度の高いモデルを必要とする場合に使用します。 注: これらのシミュレーションは実行に長時間を要します。
- 離散化剛体 – ベルトは、ブッシュによって結合された一連の剛体としてモデル化されます。このモデルは、ベルトプーリーシステムの全体的な動きに関心がある場合に使用します。これらのシミュレーションは、通常、NLFEベルトを使用した同様のシミュレーションより高速です。
いずれの場合も、システムのモデル化に使用する参照マーカーのXZ平面にプーリーの中心が配置されるようにシステムがモデル化されます。
注: 現時点では、ベルトプーリーシステムのマーカー参照のY軸が全体座標系のY軸と平行になるようにのみ、NLFEベルトをモデル化できます。この制約は今後のリリースで解消される予定です。
ヒント:
- Show additional parametersをアクティブにして、作成するポイントの変数名とラベルを指定します。
- プーリーのX座標とZ座標、プーリーの半径、およびベルト側の各種パラメータを設定すると、ベルトプーリーシステムの構成がプレビュー画像に表示されます。プーリーを接線方向に結んでいるラインがベルトを表しています。互換性のない情報があると、そのベルトラインは表示されません。このような情報として、重複したプーリー位置、2つのプーリーの半径合計値より小さいプーリー中心間距離などがあります。クロスベルトおよび面外のプーリーの構成はサポートされていません。
- デフォルトの設定に戻すにはReset to Defaultsをクリックします。
ベルト-プーリーシステムの編集
プーリーマウントボディの変更
デフォルトで、プーリーは回転ジョイントを経由してグラウンドボディに結合されます。この結合先を別のボディに変更するには、下の図に示すように、Projectブラウザでベルト-プーリーシステムを選択し、Attachmentsタブで結合先を変更します。
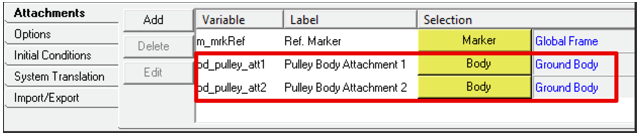
図 1.
図 1.
ベルト材料の変更
ベルト-プーリーシステムを構築した後、Attachmentsタブで、ベルト-プーリーシステムへの材料の結合を通してベルトの材料を変更できます。

図 2.
図 2.
プーリー材料の変更
プーリー材料は、プーリーのグラフィックシステムを選択し、Attachmentsタブで材料の結合を変更することにより、変更することができます。

図 3.
図 3.
ベルトパラメータの変更
ベルトパラメータは、ベルト-プーリーシステム内で使用可能なデータセットParameters DataSetを通して変更することができます。
アクティブになっているパラメータは変更できますが、変更できないパラメータはグレイアウトされています。
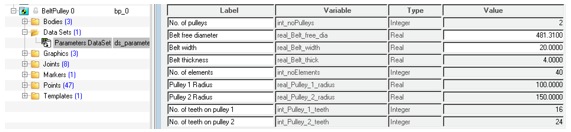
図 4.
図 4.
離散化した剛体ボディベルトの場合は、剛性パラメータとベルト張力をデータセットParameters Stiffness DataSetを使用して変更できます。

図 5.