Optimization Setup
The Optimization Setup step allows you to set up objectives and constraints in the Optimization Study.
Below is an image showing the Optimization Setup step with a list of
objectives and constraints available in the study.
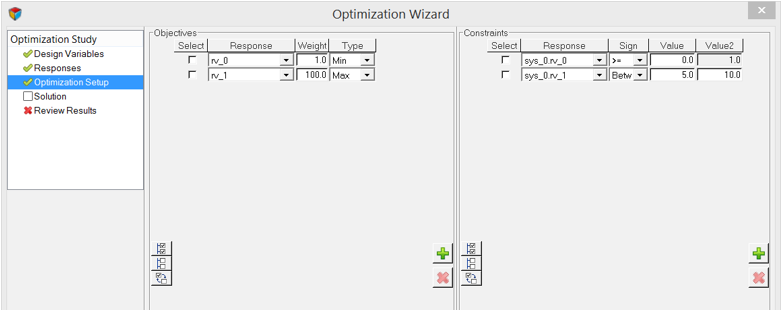
Figure 1.
Figure 1.
Note: At-least one active Response Variable must be present in the study before you
are able to access the Optimization Setup step.