運動条件
Warning ID 147。.
WARNING ID: 147 *** WARNING: INCOMPATIBLE KINEMATIC CONDITIONS 2 KINEMATIC CONDITIONS ON NODE
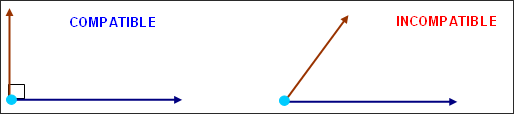
図 1. 節点速度の条件
同時に非直交方向に沿って適用される2つの運動条件は非適合であると見なされます。
例えば、全体座標系のX方向の節点上の境界制約と、同じ方向の強制速度は適合しません(このような挙動は可能ではありません)。一方、全体座標系のX方向の節点上の境界制約と、全体座標系のYまたはZ方向の強制速度は適合します。
剛体ではそのセカンダリ節点の移動が制御されていることから、剛体のセカンダリ節点で別の条件を使用することはできません(特に、そのセカンダリ節点が別の剛体に属することはできません)。
剛体のフラグIkremをデフォルト値0に設定すると、剛体のセカンダリ節点は自動的に剛壁から排除されます。剛体のメイン節点は、剛壁のセカンダリ節点として宣言されていれば、剛壁との接触を認識します。
一部の条件に適合性がないにもかかわらず同時に同じ節点に適用された場合、これらの条件は正しく考慮されないため、モデルの挙動は保証されません。この場合/PARITH/ONオプションはサポートされないため、これらの警告のソースを確認し、モデルを適合させることが必要です。
同時に適用されることがない(例えばアクティブ化間隔[Tstart, Tstop]が重ならないため)2つの適合性がない条件については、警告を考慮する必要はありません。
さらにRadioss Starterにより、計算の実行を阻止するこれらの警告よりも明確なその他のエラーは発行されません。これは、運動条件の適合性の解析はRadioss Starterで処理するには複雑すぎる場合があるためです。このような場合、警告が実行のエラー終了の唯一の手掛かりとなり、モデルをチェックする責任はユーザーにあります。
剛体のメイン節点。
メッシュの節点を剛体のメイン節点として設定することが推奨されないのはなぜですか?
- メイン節点の局所座標系には、回転を強制するオプションとの適合性がありません(境界条件と強制速度を除きます)。回転剛性を持つ要素(ビーム、一部のスプリング、シェルなど)が結合されていると、非適合性が発生します。
- 剛体定義で使用されるフラグICoGに応じ、大量の質量および慣性が節点に局所的に付加される場合があります。また、節点が剛体の質量中心に移動される場合もあります。
“RIGID BODY UNSTABLE"エラー。
**ERROR: RIGID BODY 345886 UNSTABLE
- 剛体の回転速度
- 時間ステップ
剛体が1つのサイクルで1ラジアン以上回転しています。この状況は計算の発散が原因で発生します。モデルおよびその挙動をチェックする必要があります。
Warning ID 345とWarning ID 86。
WARNING ID: 345 *** WARNING/CHECK TIED INTERFACE 93836629 1218 601311 601309 601310 601312 1.0218 -0.0095 1.339E-01
- このメッセージは、最も近いメインセグメントを検索するための定式化Isearch =2(Radioss V4.1以降でのこのフラグのデフォルト値)を使用するインターフェースTYPE2の場合に発行されます。
93836629 1218 601311 601309 601310 601312 1.0218 -0.0095 1.339E-01 # S Seg M1 M2 M3 M4 r s hここで、- S
- 関心のあるセカンダリ節点のID。
- Seg
- メインセグメントの番号(ID)。
- M1、M2、M3、M4
- メインセグメントを定義する節点のID
- r、s
- メインセグメント上へのセカンダリ節点投影のIsoパラメータ座標。-1 ≤ r ≤ 1および-1 ≤ s ≤ 1の場合、節点はセグメントの内側に投影されます。
- h
- メインセグメントを基準にしたセカンダリ節点の高さ。
rの値またはsの値が-1~1の範囲にない場合に、このメッセージが出力されます。つまり、セカンダリ節点が、最も近いメインセグメントの外側に投影される場合です。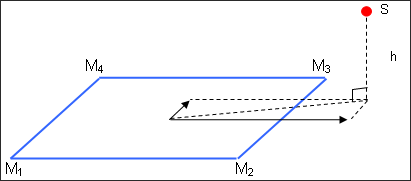
図 2.このメッセージの原因は、メインセグメントを基準にしたセカンダリ節点の高さではありません。
インターフェースTYPE2でSpotflag =0の場合、セグメントのメイン節点の質量または慣性が負数になることから、最初のサイクルでRadioss Engineにエラーが発生することがあります。セグメントのメイン節点の剛性が負数となって、Radioss Engineの実行中に次のエラーが発生することもあります。** ERROR : NEGATIVE STIFFNESS NODE …
インターフェースTYPE2でSpotflag=1の場合、このメッセージが出力される上記に相当する状況では、セグメントのメイン節点上での最初のサイクルで、比較的重要な質量が付加されることがあります。
- 以下のメッセージの場合:
WARNING ID: 86 ** WARNING: TIED INTERFACE TIED INTERFACE: 4533 5490 248 5430 5250 5490 5491 1.00734 1.14868
このメッセージは、最も近いメインセグメントを検索するための定式化Isearch =1に対応しています。
このメッセージの意味と起こり得る結果は、WARNING ID: 345 と同じです。
タイド接触への付加質量。
インターフェースTYPE2のメインセグメントの節点上で付加質量が発生するのはなぜですか?
インターフェースTYPE2でオプションSpotflag =1を使用すると、Radioss Engineの最初のサイクルでメイン節点に質量が付加されます。実際には、最も近いメインセグメントの中心を基準にしたセカンダリ節点の慣性が付加されます。これをIS + mSd2とします。
- IS
- セカンダリ節点の慣性
- mS
- 質量
- d
- セグメントの中心までの距離。メイン節点に付加された質量によって平衡状態が得られます。
スプリングおよびインターフェースTYPE2を使用したスポット溶接を作成する場合は、スプリングの慣性(I =m*L2)を過剰に大きくしないこと(物理的に適切であること)、およびメインセグメントを基準にしたセカンダリ節点の高さをできる限り小さくすることが重要です。
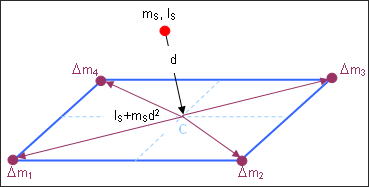
図 3.
Warning ID 547。
WARNING ID: 547 ** WARNING IN RIGID BODY DEFINITION NODE ID= 167467 IS MAIN OF RIGID BODY NUMBER 25 AND SECONDARY OF ANOTHER ONE
剛体のメイン節点が別の剛体のセカンダリ節点として機能している場合、そのメイン節点が属する剛体の標準定式化が機能していません。ただし、Lagrange乗数(/RBODY/LAGMUL)を使用している剛体は除きます。
以下の図では、3つの剛体A、BおよびCが定義されています。AとBのメイン節点には付加質量があるため、剛体AとBの質量中心は剛体の中心には位置していません。
システムA+B全体の剛体運動を表現するために、AとBのすべてのセカンダリ節点を使用して剛体Cを定義しています。同時に、AとBのメイン節点上の付加質量を考慮するために、これらのメイン節点も剛体Cで定義しています。
この場合、メッセージがRadioss Starterにより発行され、剛体A、BおよびCを同時に使用することは絶対にできません(結果は不定となります)。
一方、同じRunname_0000.radを使用して、システムC=A+B全体の剛体移動を検証できます。これには、剛体AとBを非アクティブ化し(/RBODY/OFF)、剛体Cをアクティブ化します(/RBODY/ON)。また、剛体AとBをアクティブ化し(/RBODY/ON)、剛体Cを非アクティブ化(/RBODY/OFF)することにより、AとBの独立挙動を検証します。
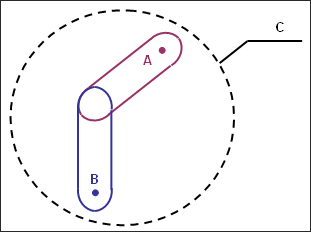
図 4.