時間ステップ
サイクルのタイムステップが小さい。
サイクルのタイムステップが非常に小さいのはなぜですか?
- 要素の場合は、関連する材料をチェックします(特に、弾塑性材料の場合はヤング率と密度、粘弾性材料の場合は粘性を)。データが提供されている単位系にエラーがあってはなりません。
次の式から要素のサイズをチェックします:
ここで、- 要素の特性長
- 材料の音速
- スケールファクター
- 節点の場合は結合されている要素の特性をチェックします。節点がインターフェースのメイン側またはセカンダリ側にある場合は、このインターフェースを確認する必要があります。剛体のメイン節点によりタイムステップが決定される場合は、出力ファイル(Runname_0000.out)の以下の箇所で報告されている剛体の慣性をチェックします:
- Rigid Body Initialization(少数の節点のみから構成される剛体については球状慣性を設定する必要がある場合もあります)。
- インターフェースについては、インターフェースのメイン側またはセカンダリ側で何らかの破断が発生している場合は、インターフェースのギャップを確認する必要があります。
StarterとEngineでの時間ステップ。
ビーム要素(/PROP/BEAM)の使用時に、Starterの出力ファイル(Runname_0000.out)で指定されているタイムステップと、Engineによりこの要素に対して指定されているタイムステップが異なります。これは正常ですか?
このタイムステップ計算では、Radioss Starterでは減衰係数は考慮されないのに対し、Radioss Engineでは考慮されます。
特に厚いビームの場合は曲げ減衰により、Engineで計算されたタイムステップがStarterで計算されたタイムステップと大きく異なることがあります。
プロパティタイプ/PROP/TYPE3 (BEAM)のビーム定式化は厚いビームには適していません。
剛体での時間ステップ計算。
剛体のメイン節点ではタイムステップはどのように計算されますか?
剛体と節点タイムステップの場合、安定性に対するタイムステップはメイン節点で計算されます(セカンダリ節点での節点タイムステップは考慮する必要ありません)。
- 剛体の質量
- メイン節点周囲の剛体慣性マトリックスの下側主慣性
- メイン節点にリポートされる剛性
- メイン節点にリポートされる回転剛性
剛体のメイン節点でのタイムステップは、メイン節点に対するセカンダリ節点での剛性の報告により計算されます。
剛体の質量と慣性は/RBODYのフラグICoGにより決まります。
ICoG =4の場合、剛体オプションに入力される質量が考慮されます。一方ICoG =2の場合、剛体オプションに入力される質量がセカンダリ節点の質量に付加されます。
/DT/INTER/DELを使用した時間ステップ。
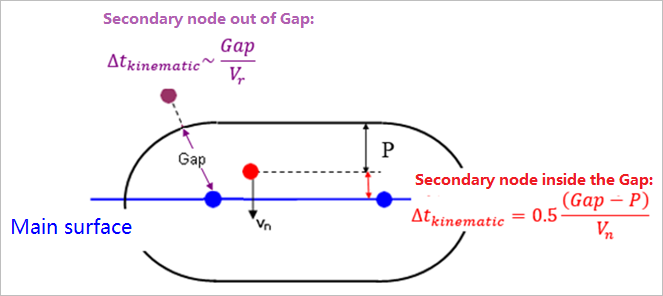
図 1.
- 運動タイムステップは、インターフェース全体に対して以下のように計算されます:
(2) ここで、 は、メイン節点とセカンダリ節点間の最大相対速度の推定です。
このタイムステップ計算は、インターフェースを通した接触検索のパフォーマンスを保証しながら、セカンダリ節点がメインサーフェスを交差することを防ぎます。
- メインセグメントのギャップ内に位置する節点については、このセカンダリ / メインの組み合わせに対して運動タイムステップは以下のようにより正確に計算されます:
(3) このタイムステップがオプション/DT/INTER/DELで指定されている値より小さい場合、セカンダリ節点がインターフェースから除去され、以下のメッセージがRadioss Engineの出力ファイルに書き込まれます:**WARNING MINIMUM TIME STEP 0.3001E-03 IN INTERFACE 1 REMOVE SECONDARY NODE 526210 FROM INTERFACE
- メインセグメントのギャップ内に位置する節点については、このセカンダリ / メインの組み合わせに対して安定性タイムステップが計算されます。オプション/DT/INTER/DELで指定されている最小値より小さい場合、この場合もセカンダリ節点がインターフェースから除去されます。
状況によっては、インターフェースの運動タイムステップがオプション/DT/INTER/DELで指定された最小タイムステップよりも小さい場合があります。このような状況が計算の開始時に発生する場合は、ギャップの値を確認してください。
計算に使用される時間ステップタイプ。
CYCLE TIME TIME-STEP ELEMENT ERROR I-ENERGY K-ENERGY T K-ENERGY R EXT-WORK MAS.ERR
100 0.1846E0-02 0.1846E-04 NODA 123 0.0% 0.4261E-04 0.6069E-02 0.3660E-25 0.6112E-02 0.000
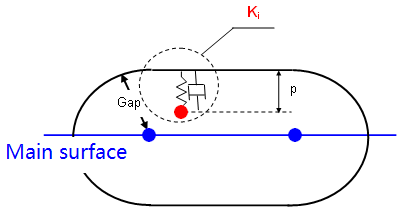
図 2.
セカンダリ節点とメインセグメント間の衝突については、安定性を保証するために、この衝突のペナルティースプリングの剛性がセカンダリ節点とメイン節点の両方に適用されます。
より厳密には、インターフェースTYPE7ではペナルティースプリングと減衰が関連付けられるため、システム全体に対する等価剛性が考慮されます。
- 節点質量
- 節点剛性
デックにインターフェースTYPE7、TYPE10、TYPE11またはTYPE19が含まれる場合、基本タイムステップが使用されている場合でも安定性を保証するために、このタイムステップがデックのすべての節点で常に計算されます。
このタイムステップが節点に適用される場合、その節点はおそらく衝突しています(そうでなければ、 で求められた節点タイムステップは基本タイムステップより大きくなります)。
メッセージ"Delete Secondary Node"と"Remove Secondary Node"。
出力ファイル(Runname_0001.out)に出力される、インターフェースTYPE7に関するメッセージ“Delete Secondary Node”と“Remove Secondary Node”との違いは何ですか?
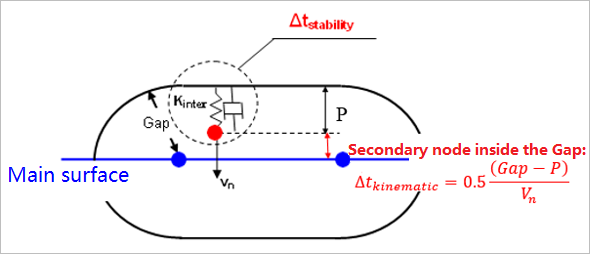
図 3.
ここで、 であれば、セカンダリ節点はインターフェースから除去されます。
メッセージ“Delete Secondary Node”は、考慮されているセカンダリ / メインの組み合わせに対するインターフェースの安定性タイムステップが、オプション/DT/INTER/DELで指定された最小タイムステップよりも小さい場合に表示されます。
- セカンダリ節点とメインセグメントの節点内での最小節点質量
- 考慮されているセカンダリ / メインの組み合わせに対するインターフェース剛性( はセカンダリ節点とメインセグメント間に適用されるペナルティースプリングと減衰に対する等価剛性)
セカンダリ / メインの組み合わせの安定性タイムステップが である場合、セカンダリ節点はインターフェースから除去されます。
これらのメッセージが同じサイクル内で同じ節点と同じインターフェースに対して数回書き込まれる場合があります(節点が同じサイクル内で複数のメインセグメントに接触し、複数の接触のタイムステップがオプション/DT/INTER/DELで指定されている最小タイムステップより小さい場合)。