/INTER/TYPE20(廃止)
ブロックフォーマットのキーワード これは、一般的な単一サーフェスまたはサーフェス対サーフェスのインターフェースです。
エッジ-エッジの接触も使用できます。ペナルティ剛性は一定であるため、時間ステップの影響は受けません(標準ペナルティ剛性の場合)。このインターフェースは、インターフェースTYPE3、TYPE5、TYPE7、TYPE11またはTYPE19に代えて使用できます。インターフェースは、基本的に1つまたは2つのサーフェスによって定義されます。1つのサーフェスのみが使用される場合、このサーフェスは自己接触を行います。2つのサーフェスが定義される場合、サーフェス2の節点がサーフェス1に衝撃を与えます。対称処理をアクティブにすることができます。サーフェス1および2のエッジは、接触において考慮されます。サーフェスに節点を追加できます。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE20/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| surf_ID1 | surf_ID2 | Isym | Iedge | grnd_ID | line_ID1 | line_ID2 | edge_angle | ||
| Igap | Ibag | Idel | |||||||
| Fpenmax | |||||||||
| 空白のフォーマット | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Stfac | Fric | Gap0 | Tstart | Tstop | |||||
| IBC | Inacti | VISs | VISF | ||||||
| Ifric | Ifiltr | Xfreq | Iform | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | |||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C6 | |||||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| inter_ID | インターフェースの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子 (整数、最大10桁) |
|
| inter_title | インターフェースのタイトル (文字、最大100文字) |
|
| surf_ID1 | 第1サーフェスの識別子 (整数) |
|
| surf_ID2 | 第2サーフェスの識別子
(整数) |
|
| Isym | 節点とサーフェスの対称的な接触処理のフラグ
(整数) |
|
| Iedge | エッジ定義フラグ
(整数) |
|
| grnd_ID | サーフェス節点に節点を追加するために使用する節点グループ識別子 (整数) |
|
| line_ID1 | 第1ラインの識別子 (整数) |
|
| line_ID2 | 第2ラインの識別子 (整数) |
|
| edge_angle | エッジ角 デフォルト = 91(実数) Iedge = 3の場合にのみ使用します。 2つのエッジ間の角度がedge_angleより小さい場合、そのエッジは考慮されます。 |
|
| Igap | ギャップ/要素オプションフラグ
(整数) |
|
| Ibag | 接触時のエアバッグベントホール閉鎖フラグ
(整数) |
|
| Idel | 節点およびセグメントの削除フラグ。 5
(整数) |
|
| Fpenmax | 最大初期貫通係数(0 < Fpenmax ≤ 1) 10 デフォルト = 1.0(実数) |
|
| Stfac | インターフェース剛性スケールファクター。 デフォルト = 1(実数) |
|
| Fric | Coulomb摩擦。 (実数) |
|
| Gap0 | 衝撃アクティブ化の最小ギャップ 6 Igap = 0の場合、デフォルトは:
(実数) |
|
| Tstart | 開始時間 (実数) |
|
| Tstart | 一時的な非アクティブ化の時間。 (実数) |
|
| IBC | 接触時の境界条件の非アクティブ化フラグ (ブーリアン) |
|
| Inacti | 初期貫通時の剛性の非アクティブ化フラグ 9
(整数) |
|
| VISs | インターフェース剛性の臨界減衰係数 デフォルト = 0.05(実数) |
|
| VISF | 接触面摩擦の臨界減衰係数 デフォルト = 1.0(実数) |
|
| Ifric | 摩擦定式化フラグ。 13 14
(整数) |
|
| Ifiltr | 摩擦フィルタリングフラグ。 15
(整数) |
|
| Xfreq | フィルタリング係数。 (実数) |
|
| Iform | 摩擦ペナルティ定式化のタイプ。
(整数) |
|
| C1 | 摩擦則係数。 (実数) |
|
| C2 | 摩擦則係数。 (実数) |
|
| C3 | 摩擦則係数。 (実数) |
|
| C4 | 摩擦則係数。 (実数) |
|
| C5 | 摩擦則係数。 (実数) |
|
| C6 | 摩擦則係数。 (実数) |
境界条件の非アクティブ化フラグ:IBC
| (1)-1 | (1)-2 | (1)-3 | (1)-4 | (1)-5 | (1)-6 | (1)-7 | (1)-8 |
|---|---|---|---|---|---|---|---|
| IBCX | IBCY | IBCZ |
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| IBCX | 衝撃時のX境界条件の非アクティブ化フラグ
(ブーリアン) |
|
| IBCY | 衝撃時のY境界条件の非アクティブ化フラグ
(ブーリアン) |
|
| IBCZ | 衝撃時のZ境界条件の非アクティブ化フラグ
(ブーリアン) |
コメント
- 最も単純な入力は、1つの自己接触サーフェスsurf_ID1のみを入力する方法です。対称性処理のフラグIsymは節点-サーフェス接触に使用されますが、エッジ-エッジ接触は常に対称です。
- インターフェースTYPE7またはTYPE11の入力を模擬するには、以下のように入力します:
TYPE20でTYPE7の入力を模擬 TYPE20でTYPE11の入力を模擬 (TYPE20) surf_ID1 = surf_IDm (TYPE7) (TYPE20) grnd_ID = grnd_IDs (TYPE7)
(TYPE20)line_ID1 = line_IDs (TYPE11) (TYPE20)line_ID2 = line_IDm (TYPE11)
(TYPE20)line_ID1 = 0
(TYPE20)line_ID2 = 0
(TYPE20) surf_ID1 = 0 (TYPE20) grnd_ID = 0
(TYPE20) surf_ID2 = 0 (TYPE20)Isym = 2
(TYPE20)Iedge = 0
(TYPE20) surf_ID2 = 0 (TYPE20)Isym = 0
(TYPE20)Iedge = 0
- SPMDの場合、surf_IDmによって定義される各メインセグメントを1つの要素に関連付ける必要があります(ボイド要素の場合もあります)。
- フラグIbagについては、モニター体積オプション(モニター体積(エアバッグ))をご参照ください。
- フラグ Idel = 1のCPUコストはIdel = 2よりも高くなります。
- Igap = 0の場合、Gap0に使用されるデフォルト値。次のように計算されます:
(1) ここで、- t
- メインシェル要素の平均板厚
- l
- メインソリッド要素の平均辺長
- lmin
- すべてのメインセグメント(シェルまたは3次元ソリッド)の中の最小辺長
- Igap = 1の場合、ギャップは衝撃のそれぞれに対して下記の式で計算されます:
(2) ここで、- gm: メイン要素のギャップ:
、ここでtは、シェル要素に対するメイン要素の板厚
gm = 0(3次元ソリッド要素の場合)
- gs: セカンダリ節点のギャップ:
gs = 0(セカンダリ節点がどの要素にも結合されていないか、3次元ソリッド要素またはスプリング要素にのみ結合されている場合)
ここでtは、セカンダリ節点に結合されているシェル要素の最大板厚です。
(トラスおよびビーム要素の場合)。ここで、Sは要素の断面とします。
セカンダリ節点が複数のシェルおよび/またはビームまたはトラスに結合されている場合は、計算された中で最も大きいセカンダリギャップが使用されます。
シェル要素のフリーエッジが接触している場合、Igapは、以下のようにフリーエッジの境界シェルのギャップをシフトできます。
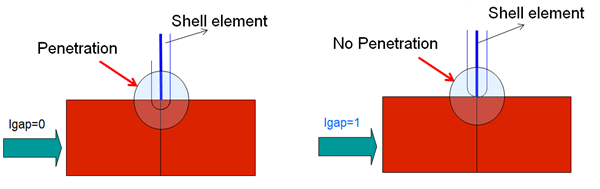
図 1.
- gm: メイン要素のギャップ:
- 境界条件の非アクティブ化は、セカンダリ節点グループ(surf_IDs)に適用されます。
- 節点がスプリング要素に属している場合にInacti = 3であると、初期エネルギーが発生することがあります。Inacti = 5:

図 2. - 最大貫通値は、実際のギャップ(可変ギャップを含む)の割合として設定されます。
セカンダリ節点の初期貫通が計算された最大値(Fpenmax)より大きい場合、その節点はインターフェースで非アクティブとなります(節点剛性の非アクティブ化)。
- 1つの節点が2つのサーフェスに同時に属することができます。
- 剛性係数の値に制限はありません(ただし、値が1.0より大きいと、最初の時間ステップが短くなる場合があります)。
- 摩擦定式化の場合:
- 摩擦フラグ = 0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:
ここで、 ( は、クーロン摩擦係数)
- フラグIfric > 0の場合、新しい摩擦モデルが導入されます。この場合、摩擦係数は関数
によって設定されます。ここで、
- メインセグメントの垂直抗力の圧力
- セカンダリ節点の接線速度
- 摩擦フラグ = 0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:
- 現在は、係数C1~C6を使用して、新しい摩擦定式化の可変摩擦係数
を定義しています。以下の定式化を使用できます:
- Ifric = 1(汎用の粘性摩擦則):
(3) - Ifric = 2(修正Darmstad則):
(4) - Ifric = 3(Renard則):
の、
、右記の場合;
、右記の場合;
ここで、
- 第1臨界速度 は、0以外にする必要があります( )。
- 第1臨界速度 は、第2臨界速度 より小さくする必要があります( )。
- 静止摩擦係数 と動摩擦係数 は、最大摩擦 より小さくする必要があります( かつ )。
- 最小摩擦係数 は、静止摩擦係数 および動摩擦係数 より小さくする必要があります( かつ )。
- Ifric = 1(汎用の粘性摩擦則):
- 摩擦フィルタリング:Ifiltr ≠ 0の場合は、接線力がフィルタを使用して以下のようにスムージングされます:
(5) ここで、α係数は、以下のように計算されます:- Ifiltr= 1の場合、 、単純な数値フィルター
- Ifiltr = 2 ➤ の場合、標準の-3dBフィルター。ここで、 で、Tはフィルタリング期間
- Ifiltr = 3 ➤
の場合、カット周波数Xfreqを使用する標準の-3dBフィルター
フィルタリング係数Xfreqは、0~1の値にする必要があります。
- 摩擦ペナルティ定式化Iform
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです:
(6) このとき、粘着力は以下のように計算されます:
ここで、
- Iform = 2の粘性定式化の場合、摩擦力は次のとおりです:
(7) このとき、粘着力は以下のように計算されます:
ここで、
ここで、Vtは、接触接線速度です。
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです: