Spring Dampers
スプリングとダンパの結合性、プロパティ、および初期条件の編集ではSpring Damperツールを使用します。
スプリングダンパの作成
スプリングダンパは、コイルスプリングダンパまたはトーションスプリングダンパです。
ヒント: コイルスプリングの場合は、Create explicit
graphicsチェックボックスをアクティブにして、そのスプリングダンパに関連するグラフィックを作成します。
スプリングダンパの編集
スプリングダンパの結合性の定義
Spring DampersパネルのConnectivityタブでは、スプリングダンパーの取り付けボディと取り付け点を定義することが可能です。
スプリングダンパのプロパティの定義
Spring DampersパネルのPropertiesタブでは、コイルスプリングまたはトーションスプリングの並進または回転剛性および減衰特性を定義することが可能です。
注:
- 線形プロパティを持つスプリングダンパの場合、Force_SpringDamperステートメントがMotionSolve.xmlに書き込まれます。
- 非線形スプリングまたは減衰を定義するには、CurveまたはExpressionタイプを使用してください。
- CurveタイプまたはExpressionタイプをスプリングまたはダンパのプロパティに指定した場合、Force_Scalar_TwoBodyステートメントがMotionSolve xmlに書き込まれます。PreLoadタブを使用して指定した初期荷重は考慮されません。
- {sd.DM}(sdはスプリングダンパの変数名)は、スプリング両端間の距離の大きさをトレースします。この式は、DM(i,j)として評価されます。ここで、iは、Body 1上のPoint 1におけるスプリングダンパマーカー、jはBody 2上のPoint 2におけるスプリングダンパマーカーです。
- {sd.VR}は、両端点間の相対動径速度をトレースします。この式はVR(i,j)として評価されます。
- {sd.AZ}は、両端点間の相対回転をトレースします。この式はAZ(i,j)として評価されます。
- {sd.WZ}は、両端点間の相対回転速度をトレースします。この式はWZ(i,j)として評価されます。
スプリングダンパの初期荷重の定義
Spring DampersパネルのPreloadタブでは、線形コイルスプリングまたはトーションスプリングの初期荷重プロパティを指定することが可能です。スプリングダンパは、その剛性プロパティを定義する関数によって力 / トルクの特性が決定されるため、カーブや式による初期荷重は適用できません。
-
コイルスプリングの場合は以下の手順に従います:
-
トーションスプリングの場合は以下の手順に従います:
注:
- 初期荷重は、モデル化された位置でのスプリング内の初期フォースまたはトルクです。全初期荷重は、Preload値、Free Length値、またはそれら2つの組み合わせのいずれかを用いて指定することができます。
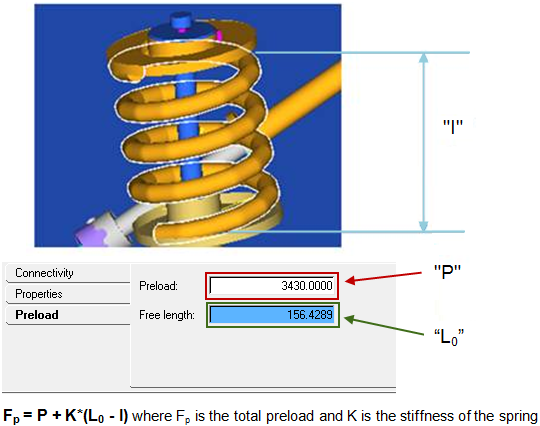
図 1. - 全初期荷重Fpは、初期荷重Pおよび長さの変化によるフォースK* (Lo –l)の合計として適用されます。ここで、Kは剛性、Loは自由長、およびlはスプリングのモデル化長さです(上記の図を参照)。
- 例えば、定義されたスプリングの2つの端点(スプリングのモデリングされた長さ)が100mmで、自由長が110と指定されている場合、それは10mm変形された状態のスプリングを表し、有効な初期荷重は10*Kです。ここで、Kはスプリングの剛性です。
- Preload値を追加で指定すると、そのフォースは全初期荷重にも加算されます。
- 別の例では、定義されたスプリングの2つの端点(スプリングのモデル化された長さ)が100mmで、自由長が0.0である場合、それは現在の状態ではスプリングが100mm拡張された状態であり、その限度までの初期荷重(-100*K)が適用されます。
- MotionViewは、デフォルト値の自由長を2つの端点間の距離としてコイルスプリングダンパを生成します。
スプリングダンパに関するユーザー定義プロパティの使用
必要に応じ、User-Definedタブを使用してスプリングダンパを定義します。これにより、ユーザーサブルーチンを使用してそのスプリングダンパのプロパティを指定できます。