MV-7003:MotionViewとMotionSolveを使用した単入力単出力(SISO)制御システムのシミュレート
このチュートリアルでは、MotionViewで単入力単出力(SISO)コントローラーを実装し、MotionSolveを使用してそれを解析する方法を学習します。
外乱が生じている状況でローターの基準速度を維持するという問題について考えてみましょう。下の図は、この制御システムのブロック図を示しています。
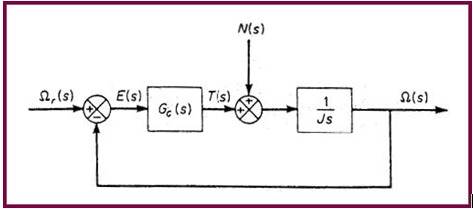
図 1. 制御システムのブロック図
図 1. 制御システムのブロック図
単純なアプローチの1つに、以下のような比例積分(PI)コントローラー(Ogata、1995年)を設計する方法があります。(1)
このチュートリアルでは、このPIコントローラーを実装する方法を示します。
ローターモデルの読み込み
基準速度についてのソルバー変数の追加
-
ProjectブラウザでModelを右クリックし、を選択(またはツールバーから
 を 右クリック)します。
Add SolverVariableダイアログが表示されます。
を 右クリック)します。
Add SolverVariableダイアログが表示されます。
SISOコントローラの追加
このステップでは、SISOコントローラを追加します。コントローラへの入力は、基準速度のソルバー変数とローターの回転速度との間の誤差です。コントローラの出力は、ローターにかけられるトルクです。シミュレーションのパラメータは任意でKp=1、K=10と選択されています。
-
ProjectブラウザでModelを右クリックしを選択(または
 を右クリック)します。
Add Controlダイアログが表示されます。
を右クリック)します。
Add Controlダイアログが表示されます。
制御力トルクの追加
このステップでは、ローターボディにかかる制御力トルクを作成します。このトルクのZ-コンポーネントが、コントローラの出力となります。
-
ProjectブラウザでModelを右クリックしを選択(またはForces
 を右クリック)します。
Add Force or ForcePairダイアログが表示されます。
を右クリック)します。
Add Force or ForcePairダイアログが表示されます。 -
Tzの下でExpressionを選択し、'{MODEL.siso_0.OUTPUT}’と入力します。
ヒント:
 をクリックしてexpression builderにアクセスし、モデルツリーを使ってこの式を作成することも可能です
をクリックしてexpression builderにアクセスし、モデルツリーを使ってこの式を作成することも可能です
制御力についての出力リクエストの追加
-
ProjectブラウザでModelを右クリックしを選択(または
 を右クリック)します。
Add Outputダイアログが表示されます。
を右クリック)します。
Add Outputダイアログが表示されます。 -
その他の選択は、下の図のとおりとします:

図 2. 制御力についての出力リクエストの設定
シミュレーションの実行
-
Run
 をクリックし、Runパネルを表示させます。
をクリックし、Runパネルを表示させます。
-
Runをクリックします。
下の図のように結果が表示されます。
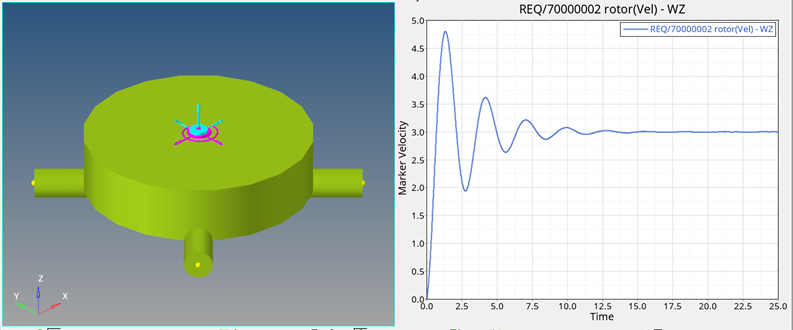
図 3. PIスピードコントローラのシミュレーション結果
参考資料
K. Ogata, Modern Control Engineering, 1990, Prentice-Hall Inc., Englewood Cliffs, N.J., US