MV-1027:点-可変形曲線(PTdCV)高次ペア拘束のモデル化
本チュートリアルでは、PTdCV(点-可変形曲線)ジョイントをモデル化する方法について学習します。
ポイントの作成
このステップでは、PTdCVモデルにポイントを作成します。
始める前に、mbd_modeling\interactiveフォルダーにあるKG_N_MM_S_50elems2.h3dファイルを自身の<作業ディレクトリ>にコピーします。
-
以下のいずれかの方法で、Add Point or PointPairダイアログを開きます:
- ProjectブラウザのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Point)アイコンを右クリックします。
(Point)アイコンを右クリックします。
ボディの作成
このステップでは、PTdCVモデルにボディを作成します。
-
以下のいずれかの方法で、Add Body or BodyPairダイアログを開きます:
- ProjectブラウザのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Body)アイコンを右クリックします。
(Body)アイコンを右クリックします。
-
 (Graphic fileブラウザ)アイコンをクリックし、<作業ディレクトリ>からKG_N_MM_S_50elems2.h3dを選択します。
注: H3D file欄には自動的に同じファイルパスが表示されます。
(Graphic fileブラウザ)アイコンをクリックし、<作業ディレクトリ>からKG_N_MM_S_50elems2.h3dを選択します。
注: H3D file欄には自動的に同じファイルパスが表示されます。 -
 をダブルクリックします。
をダブルクリックします。
マーカーの作成
このステップでは、ビームに必要なマーカーを定義します。
-
以下のいずれかの方法で、Add Marker or MarkerPairダイアログを開きます:
- ProjectブラウザのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Marker)アイコンを右クリックします。
(Marker)アイコンを右クリックします。
-
Propertiesタブで、
 をダブルクリックします。
をダブルクリックします。
-
をダブルクリックします。
ジョイントの作成
このステップでは、モデルに必要な固定ジョイントを定義します。
-
以下のいずれかの方法で、Add Joint or JointPairダイアログを開きます:
- ProjectブラウザのModelを右クリックしてを選択します。
- Model-Constraintsツールバーで、
 (Joints)アイコンを右クリックします。
(Joints)アイコンを右クリックします。
- ダイアログで、LabelにJoint0と入力します。
- ドロップダウンメニューでFixed Jointを選択し、OKをクリックします。
-
パネル内で、
 をダブルクリックします。
をダブルクリックします。
- ダイアログでBeamを選択し、OKをクリックします。
-
 をダブルクリックします。
をダブルクリックします。
- ダイアログでGround Bodyを選択し、OKをクリックします。
-
をダブルクリックします。
- ダイアログでPointbeamInterface1を選択し、OKをクリックします。
-
ステップ1から9までを繰り返し、2つ目の固定ジョイントを作成します。
- LabelにJoint1と入力します。
-
にPointbeamInterface2を選択します。
- Joint0について、その他のステップすべてに上記と同じ入力を使用します。
可変形カーブの作成
このステップでは、ビームのサーフェス上に可変形カーブを定義します。
-
以下のいずれかの方法で、Add DeformableCurveダイアログを開きます:
- ProjectブラウザのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Deformable Curve)アイコンを右クリックします。
(Deformable Curve)アイコンを右クリックします。
- ダイアログで、LabelにDeformableCurve0と入力します。
- OKをクリックします。
-
Propertiesタブで、可変形カーブのプロパティを指定します。
-
 の横のチェックボックスをクリックします。
AddボタンがInsertボタンに変わります。
の横のチェックボックスをクリックします。
AddボタンがInsertボタンに変わります。 -
Insertの横のテキストボックスに、10と入力します。続いて、Insertをクリックします。
11個のコレクターがパネルに表示されます。
-
個々のをダブルクリックします。
-
PTdCVジョイントの作成
このステップでは、PTdCVジョイントを作成します。
-
以下のいずれかの方法で、Add AdvJointダイアログを開きます:
- ProjectブラウザのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Advanced Joint)アイコンを右クリックします。
(Advanced Joint)アイコンを右クリックします。
グラフィックスの作成
このステップでは、ボールにグラフィックを作成します。
-
以下のいずれかの方法で、Add Graphics or GraphicPairダイアログを開きます:
- ProjectブラウザのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Graphics)アイコンを右クリックします。
(Graphics)アイコンを右クリックします。
- ダイアログで、LabelにGraphic0と入力します。
- TypeドロップダウンメニューからSphereを選択します。続いて、OKをクリックします。
-
Connectivityタブで、をダブルクリックします。
- ダイアログでBallを選択し、OKをクリックします。
-
をダブルクリックします。
- ダイアログでPoint4を選択し、OKをクリックします。
- Propertiesタブで、Radiusの下に2.0と入力します。
- Visualizationタブで、グラフィックの色を選択します。
節点の検索
このステップでは、Bodies Panelに戻り、ビーム上の節点を探します。
-
Referenceツールバーで、(Bodies)アイコンをクリックします。
-
ダイアログを閉じます。
モデルは、図 1で示すとおりになるはずです。
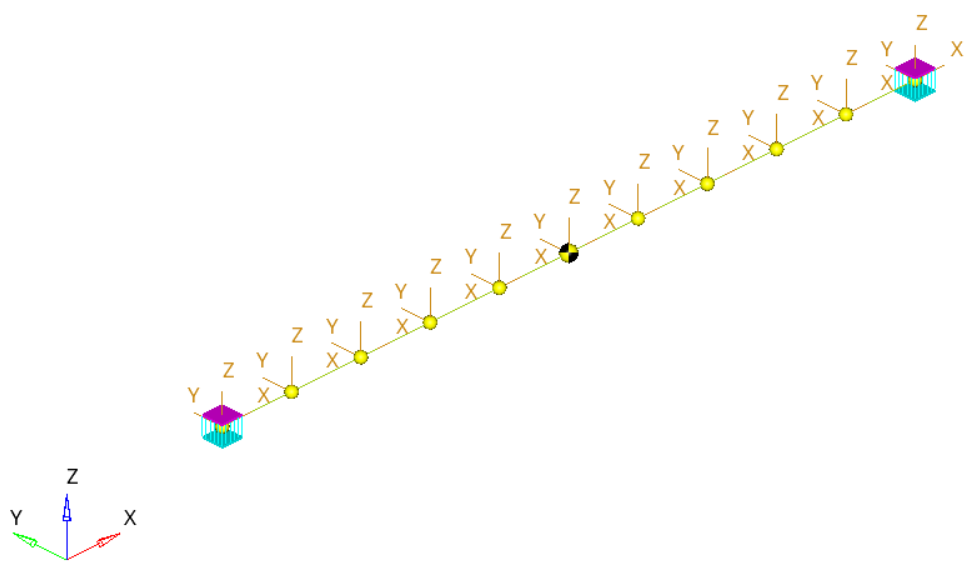
図 1.
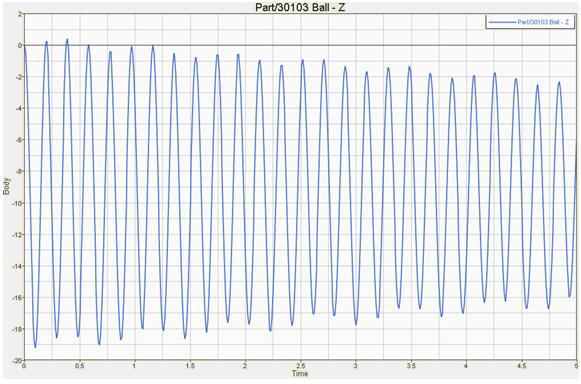
モデルの実行
このステップでは、PTdCVジョイントの制約を伴うモデルを実行します。
重要: この種の拘束は、接触のポイントがカーブについて指定されたデータ範囲内に留まるとは限りません。この要件を満たすためには、端部における追加の力をユーザーが定義する必要があります。接触ポイントがこのカーブについて指定されたデータ範囲に収まっていない場合、(これを満足するよう追加のフォースが定義されない限り)ソルバーはエラーを発します。そのような場合は、ボールの初期速度を変更するか、もしくはカーブについて指定されたデータ範囲を大きくする、もしくは、より短いタイムインターバルでシミュレーションを実行する必要があります。
-
ツールバーで、
 (Run)をクリックします。
(Run)をクリックします。
-
Runパネルで、図 2にリストされている値を指定します。

図 2. -
 (ブラウザアイコン)をクリックし、ソルバーファイルの名称を指定します。
(ブラウザアイコン)をクリックし、ソルバーファイルの名称を指定します。
-
Model Checkツールバーで、
 (Check Model)ボタンをクリックし、モデルのエラーをチェックします。
(Check Model)ボタンをクリックし、モデルのエラーをチェックします。
-
ソルバーが完了したら、
 (Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。