MV-7031: 履帯車両モデリング
このチュートリアルでは、MotionViewを使用して履帯車両を構築し、MotionSolveを使用してスロープ上の車両走行をシミュレートする方法を学習します。
モデルを開いて確認する
mbd_modeling\interactive\trackフォルダーから、ファイルのTrack_Start.mdlとsoil_input.datを自分の<作業ディレクトリ>にコピーします。
-
 (Open Model)アイコンをクリックして、Track_Start.mdlモデルファイルを開きます。
(Open Model)アイコンをクリックして、Track_Start.mdlモデルファイルを開きます。
-
モデルを確認します。
- モデルは、mm、Kg、N、secの単位系です。
- モデルには次の2つのシステムが含まれています:ボディとサスペンション。
- ボディシステムには、互いに固定された車体(フレーム)とエンジンが含まれています。
- サスペンションシステムには、トーションスプリングダンパを使用して結合された3つのトレーリングアームが含まれています。
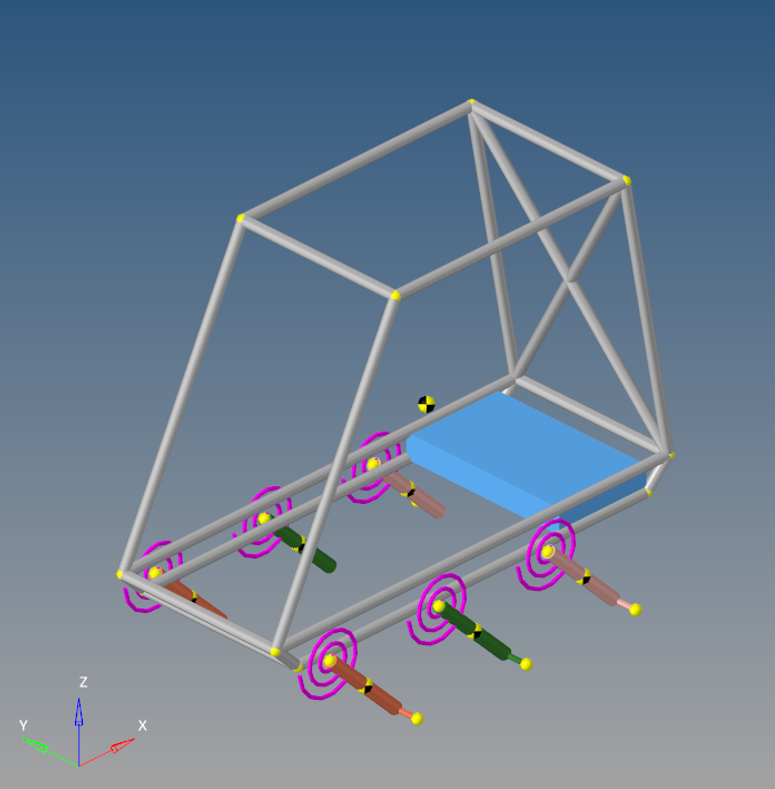
図 1.
転動体システムの作成
-
Modelメニューから、を選択します。
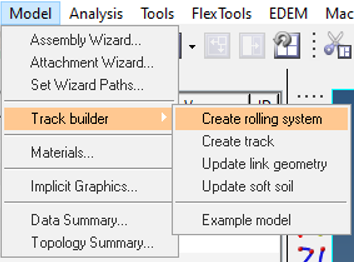
図 2. -
下の表を使用して、スプロケットタイプの転動体システムを作成します。
Rolling System Varname Rolling System Label X Y Z Radius Thickness Number of Teeth Attach to Single/Left Attach to Right Sysr_spr Sprocket 0 -500 400 200 100 16 Frame Frame 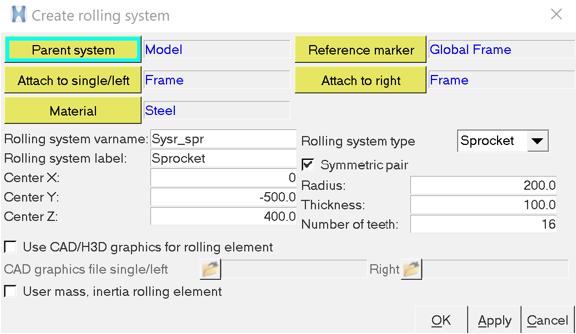
図 3. -
下の表を使用して、複数のホイールタイプの転動体システムを作成します。
ヒント: Applyボタンを使用して、複数の転動体システムを作成している間、ダイアログを開いたままにします。
Rolling System Varname Rolling System Label X Y Z Radius Thickness Attach to Single/Left Attach to Right Sysr_frntw FrontWhl 300 -500 0 200 100 Front Arm-Left Front Arm-Right Sysr_midw MidWhl 800 -500 0 200 100 Mid Arm-Left Mid Arm-Right Sysr_rearw RearWhl 1300 -500 0 200 100 Rear Arm-Left Rear Arm-Right 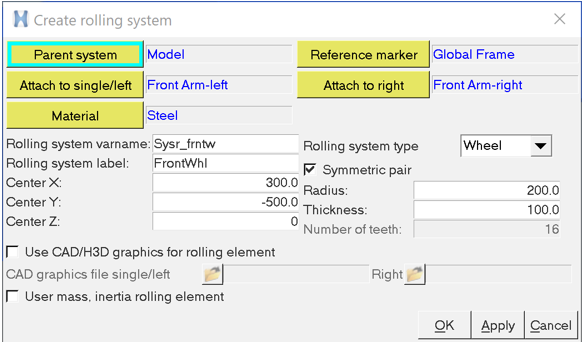
図 4. -
定義されたすべての転動体システムを含むモデルを以下に示します:
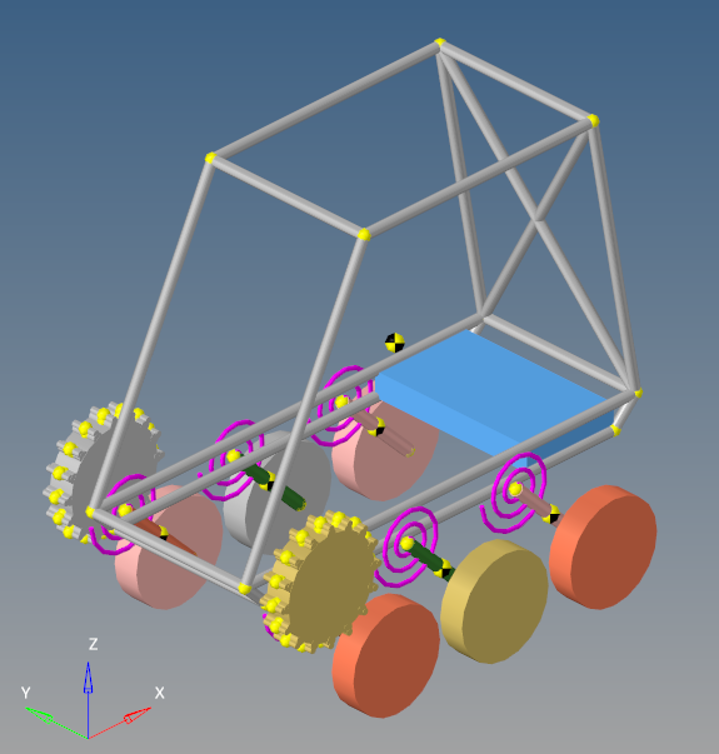
図 5.
履帯システムの作成
-
Modelメニューから、を選択します。
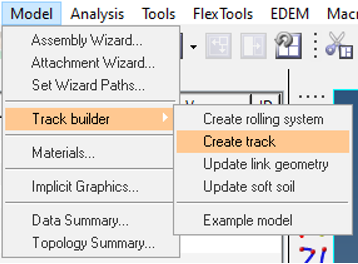
図 6. -
Applyをクリックして、左側の履帯を作成します。
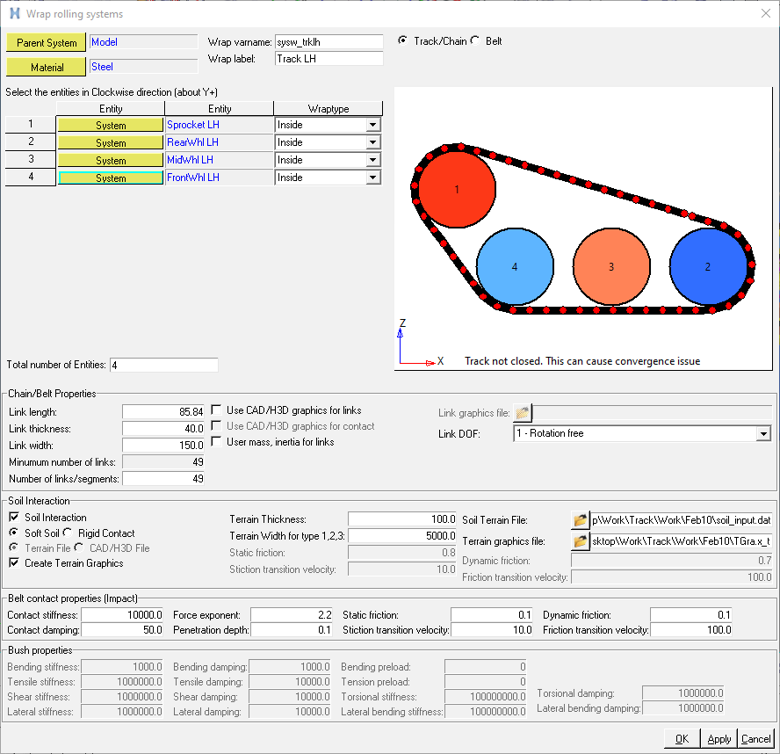
図 7.地形グラフィックスを伴う履帯を以下に示します: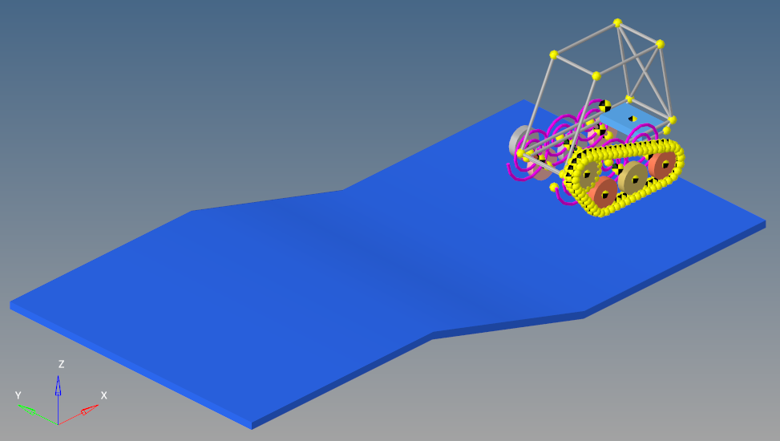
図 8. -
完成したモデルを以下に示します。
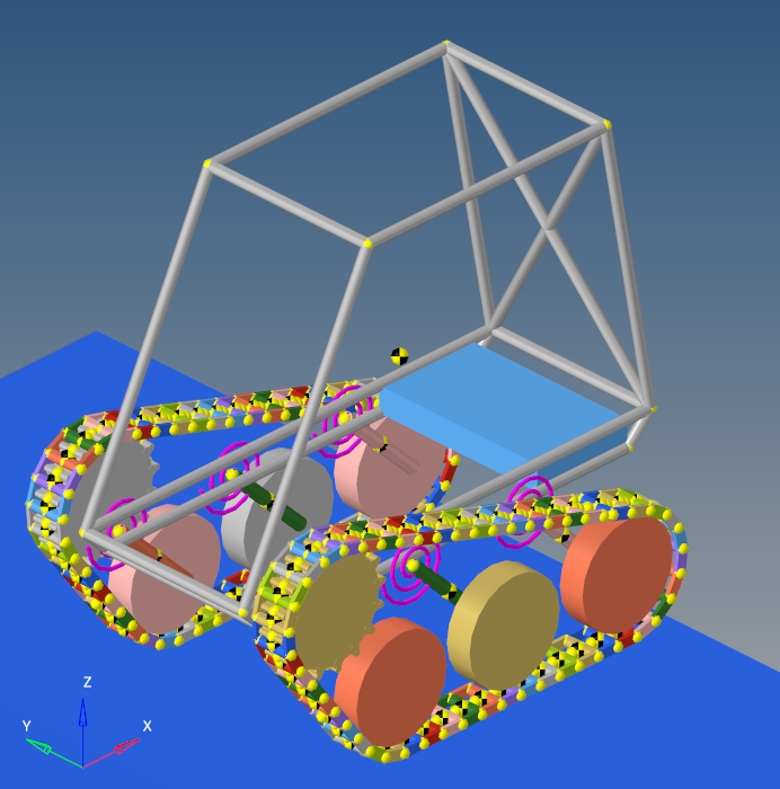
図 9.
土壌プロパティの確認
-
Modelメニューで、を選択してパラメータを表示します。
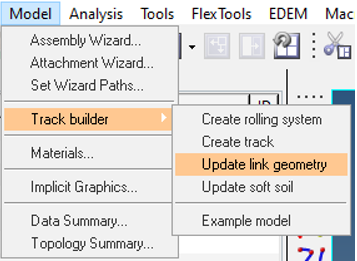
図 10. -
Update Link Geometryダイアログには、基本的なプロパティとリンク形状プロパティの一部が表示されます。データを確認し、Cancelをクリックしてダイアログを閉じます。
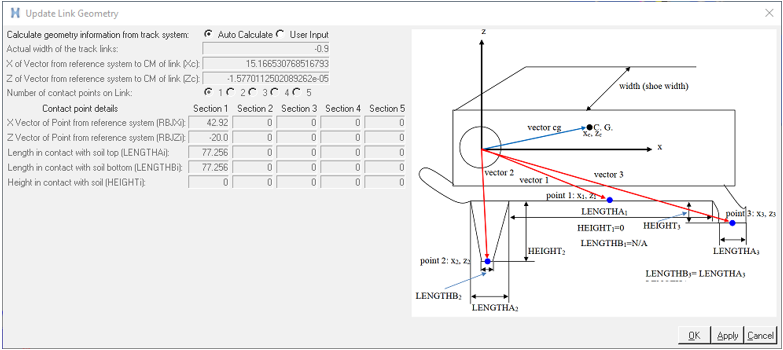
図 11. -
Modelメニューで、を選択してパラメータを表示します。
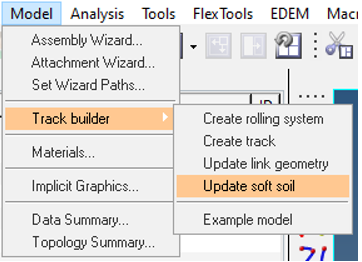
図 12. -
Update soft soil propertiesダイアログには、地形プロパティと土壌プロパティの詳細が表示されます。データを確認し、Cancelをクリックしてダイアログを閉じます。
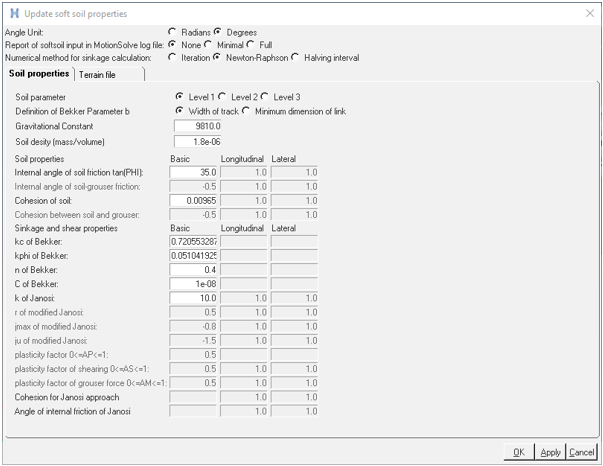
図 13.注: リンクプロパティと軟質土壌プロパティの詳細については、履帯モデルをご参照ください。
シミュレーションとポスト処理
-
Animateボタンをクリックして、
 HyperViewウィンドウに結果を読み込みます。
HyperViewウィンドウに結果を読み込みます。
-
Animationツールバーから
 (Start/Pause Animation)ボタンをクリックし、モデルをアニメーション表示します。
(Start/Pause Animation)ボタンをクリックし、モデルをアニメーション表示します。
-
アニメーションを可視化します。
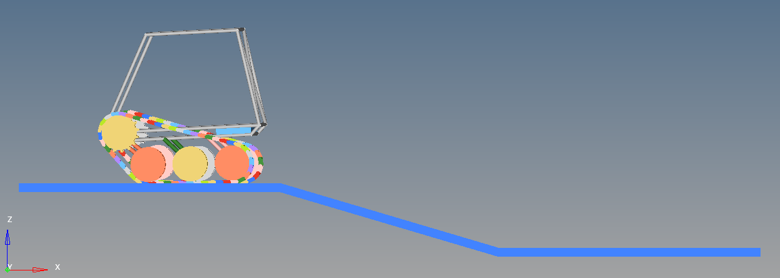
図 14. -
Page Controlsツールバーから
 (Add Page)アイコンをクリックします。
(Add Page)アイコンをクリックします。
-
アプリケーション選択ドロップダウンメニューを使って、クライアントを
 HyperGraph 2Dに切り替えます。
HyperGraph 2Dに切り替えます。
-
Build Plotsパネルで、
 をクリックして、MotionSolveの実行からの.abfファイルを読み込みます。
をクリックして、MotionSolveの実行からの.abfファイルを読み込みます。
-
Y type - REQSUBで、Sinkage of link 0をプロットします。

図 15.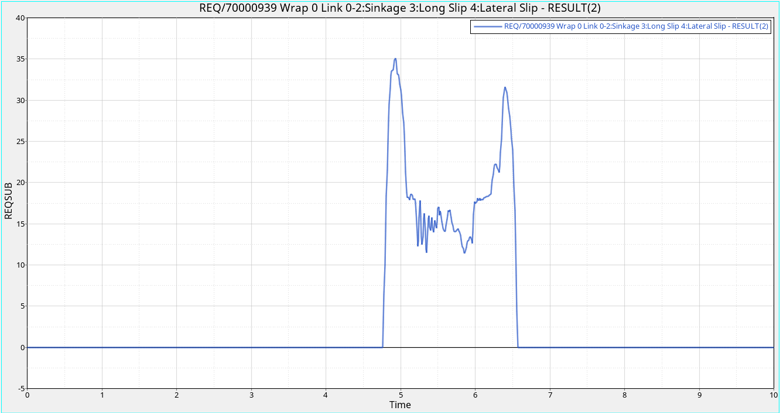
図 16.