/SENSOR/INTER
ブロックフォーマットのキーワード インターフェース力に従ってオブジェクトをアクティブ化または非アクティブ化するために使用されるセンサーを記述します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /SENSOR/INTER/sens_ID/unit_ID | |||||||||
| sens_title | |||||||||
| Tdelay | |||||||||
| int_ID | DIR | Fmin | Fmax | Tmin | Fcut | ||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| sens_ID | センサーの識別子 (整数、最大10桁) |
|
| unit_ID | 単位の識別子(オプション) (整数、最大10桁) |
|
| sens_title | センサータイトル。 (文字、最大100文字) |
|
| Tdelay | 時間遅延。 (実数) |
|
| int_ID | インターフェースまたはサブインターフェースの識別番号。 (整数) |
|
| DIR | 力の方向
(整数) |
|
| Fmin | 最小力。 3 デフォルト = 0(実数、最大 20フィールド) |
|
| Fmax | 最大力。 3 デフォルト = 0(実数、最大 20フィールド) |
|
| Tmin | 基準に達してアクティブになる前の最小継続時間。 (実数) |
|
| Fcut | カットオフ周波数。
(実数) |
コメント
- センサーを使用して、エアバッグ、強制力、圧力、強制速度をアクティブにすることができます。
- センサーを使用して、/ACTIVによって、ブリック、2Dソリッド、シェル、トラス、ビーム、スプリング、または3節点シェルの要素をアクティブまたは非アクティブにすることができます。
- センサータイプINTERの場合:接触がインターフェースで検知され、以下の力の基準を満足した時にセンサーはアクティブになります:
- または (時間Tminの間に)
Dirは力の方向を定義します:- FN
- 法線方向の力
- TF
- 接線方向の力
接触が失われた時センサーは非アクティブになります。
Tdelay(行3)と同じ期間衝突しなかった場合、センサーは非アクティブになります。
1つのインターフェースまたはサブインターフェースに1つのセンサーが使用されます。タイプINTERのセンサーは複数使用できます。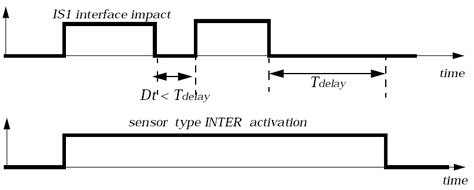
図 1. - クラス1000のSAEフィルタリングを得る場合、Fcutの推奨値は1650 Hz(1.65 ms-1)です。フィルターを適用すると、局所的な力のピークによって力ベースのセンサーが誤ってアクティブにならないようにすることができます。これを回避するもう1つの方法として、Tminに小さな値を使用する方法があります。