/SENSOR/RWALL
ブロックフォーマットのキーワード 剛壁力に従ってオブジェクトをアクティブ化または非アクティブ化するために使用されるセンサーを記述します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /SENSOR/RWALL/sens_ID/unit_ID | |||||||||
| sens_title | |||||||||
| Tdelay | |||||||||
| rwall_ID | DIR | Fmin | Fmax | Tmin | |||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| sens_ID | センサーの識別子 (整数、最大10桁) |
|
| unit_ID | 単位の識別子(オプション) (整数、最大10桁) |
|
| sens_title | センサータイトル。 (文字、最大100文字) |
|
| Tdelay | 時間遅延。 (実数) |
|
| DIR | 力の方向
(整数) |
|
| Fmin | 最小力。 デフォルト = 0(実数) |
|
| Fmax | 最大力。 デフォルト = 0(実数) |
|
| Tmin | 基準に達してアクティブになる前の最小継続時間。 (実数) |
コメント
- センサーを使用して、エアバッグ、強制力、圧力、強制速度をアクティブにすることができます。
- センサーを使用して、/ACTIVによって、ブリック、2Dソリッド、シェル、トラス、ビーム、スプリング、または3節点シェルの要素をアクティブまたは非アクティブにすることができます。
- センサータイプRWALLの場合:
センサーは、剛壁が衝突してから1サイクル後にアクティブになります。
1つの剛壁に1つのセンサーが使用されます。タイプRWALLのセンサーは複数使用できます。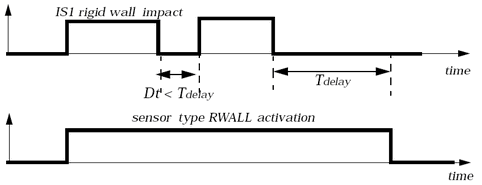
図 1.接触が剛壁で検知され、以下の力の基準を満足した時にセンサーはアクティブになります:- または (時間Tminの間に)
Dirは力の方向を定義します:- FN
- 法線方向の力
- FT
- 接線方向の力
- X
- X方向の力
- Y
- Y方向の力
- Z
- Z方向の力
接触が失われた時センサーは非アクティブになります。
- 力ベースのセンサー(RWALL)における力およびモーメント成分の制限値は正にも負にもできます。法線方向、接線方向、合計の力およびモーメント値は、常に正となります。