$-----------------------------------------------------------------ALTAIR_HEADER$ This block is required for version control[ALTAIR_HEADER]
FILE_TYPE = 'ADF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
$--------------------------------------------------------------------------UNITS$In this block we specify the units in which this file should be read[UNITS](BASE)
{length force angle mass time}
'meter' 'newton' 'radians' 'kg' 'sec'
$--------------------------------------------------------------------VEHICLE_IC$In this block we specify the initial conditions specifically initial speed of the$vehicle with respect to the vehicle IC marker in the driver attachments[VEHICLE_INITIAL_CONDITIONS]
VX0 = -20.0
VY0 = 0.0
VZ0 = 0.0
$--------------------------------------------------------------STEERING_STANDARD$This block specifies the saturation and cutoff frequency for the low pass filter for$steering output signal. These signals are global and are active for the entire event[STEER_STANDARD]
MAX_VALUE = 3.141593
MIN_VALUE = -3.141593
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$--------------------------------------------------------------THROTTLE_STANDARD$This block specifies the saturation and cutoff frequency for the low pass filter for$throttle output signal[THROTTLE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.00
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.5
$---------------------------------------------------------------BRAKING_STANDARD$This block specifies the saturation and cutoff frequency for the low pass filter for$brake output signal[BRAKE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.0
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$-----------------------------------------------------------------MANEUVERS_LIST$This block provides the list of all the maneuvers, simulation time for each maneuver$maximum solver step size (hmax) and print interval[MANEUVERS_LIST]
{ name simulation_time h_max print_interval}
'MANEUVER_1' 5.0 0.01 0.01
$---------------------------------------------------------------------MANEUVER_1[MANEUVER_1]$This block provides the ties controllers to each driver output
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_STEER_0 NONE
THROTTLE OL_0.5 NONE
BRAKE OL_0 NONE
$---------------------------------------------------------OL_STEER
$This is controller block containing all the information required by
$the driver to construct the controller. Different controllers have
$different requirements. Here we are using open loop constant type
$of controller.[OL_STEER_0]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.0
$---------------------------------------------------------OL_BRAKE[OL_0]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.0
$---------------------------------------------------------OL_THROTTLE[OL_0.5]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.5
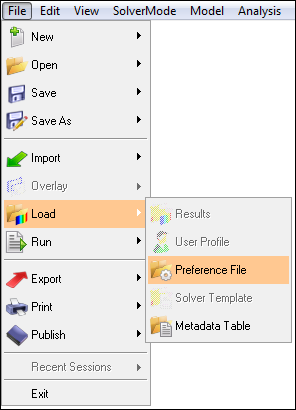 図 1.
図 1.  図 2.
図 2.  図 3.
図 3.  図 4.
図 4.  図 5.
図 5. 
 (Altair Driverアイコン)を選択すると、Altair Driverパネルが開きます。これで自動的に、Altair Driverのための車両のアタッチメントがすべて関連付けされます。
(Altair Driverアイコン)を選択すると、Altair Driverパネルが開きます。これで自動的に、Altair Driverのための車両のアタッチメントがすべて関連付けされます。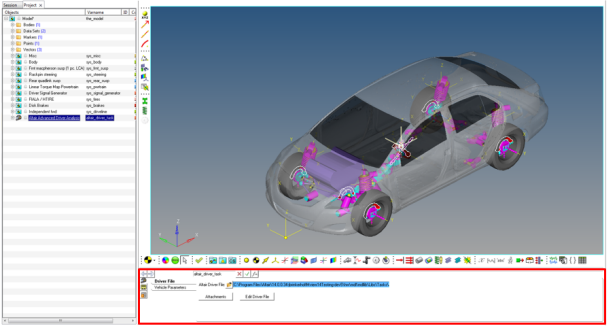 図 7.
図 7.  図 8.
図 8. 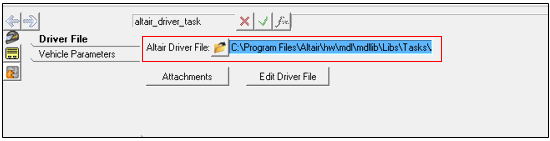 図 9. 注: Edit driver fileボタンを使って、ファイルを編集することができます。
図 9. 注: Edit driver fileボタンを使って、ファイルを編集することができます。 をクリックし、シミュレーションを開始します。
をクリックし、シミュレーションを開始します。
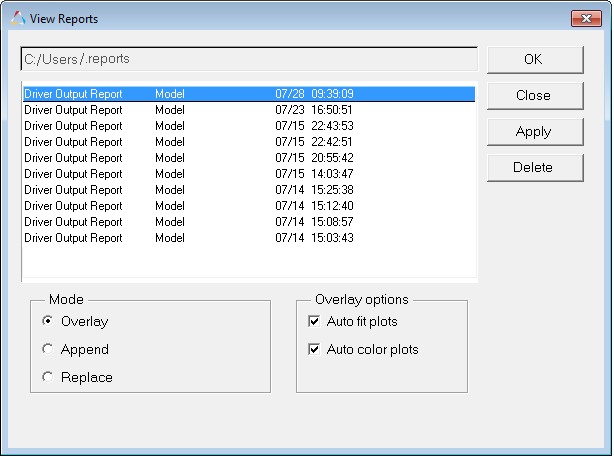 図 11.
図 11.  図 12.
図 12. 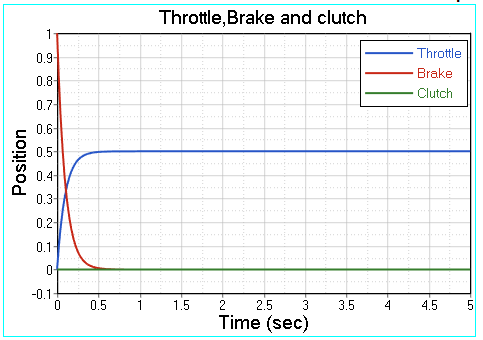 図 13.
図 13. 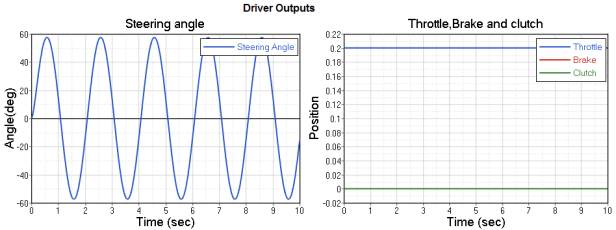 図 14.
図 14. 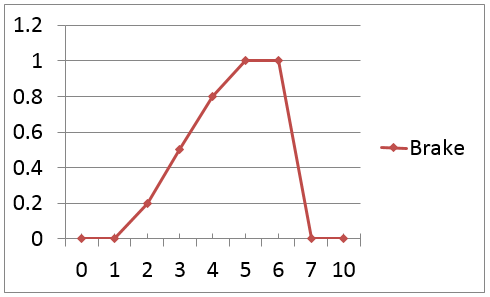 図 15.
図 15. 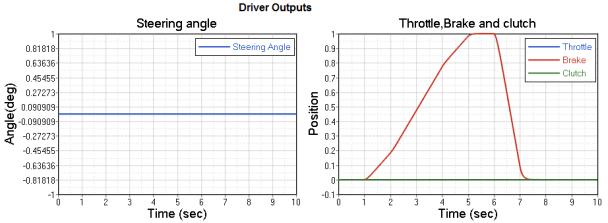 図 16.
図 16.